Что такое WatchDog и для чего он нужен

Не секрет, что высокие технологии в настоящее время охватывают все новые и новые сферы жизни человека. Еще в середине прошлого века трудно было себе представить тот рывок, который техника совершила за последние 20 лет.
Сегодня никого не удивить электронными терминалами по приему платежей, банкоматами, комплексами бытовой автоматики («Умный дом»), сложными автономными системами видеонаблюдения и т.п.
Список можно продолжать бесконечно долго, и все равно невозможно охватить сразу все области интеграции сложной электронно-вычислительной техники в современном обществе. Эти технологии делают нашу жизнь проще, комфортнее и, несомненно, гораздо интереснее.
К сожалению, несмотря на стремление к технологическому совершенству, создать что-либо совершенно надежное невозможно в силу объективных причин. Человек по природе своей несовершенен, следовательно, и созданные им приспособления не всегда действуют так, как хотелось бы. Это касается абсолютно любой сферы деятельности, включая сложнейшие стратегические комплексы и космическую отрасль.
Ведь не секрет, что чем сложнее устройство, чем больше элементов оно в себе содержит, тем выше риск возникновения непредвиденного сбоя. И дело здесь вовсе не в нежелании инженеров и программистов получить безупречный результат – просто невозможно предусмотреть абсолютно все ситуации.
Да и, кроме того, есть целый ряд причин, защиты от которых просто может не быть, либо она будет неэффективна. Никто не застрахован от внезапных перепадов напряжения питания, даже, несмотря на целый комплекс защитных устройств на этот случай, от случайных статических разрядов, от умышленных вредоносных действий недоброжелателей (например, хакерские атаки на сервера в интернете). Последствия таких событий, наверное, известны всем.
На практике, попав во внештатную ситуацию, оборудование ведет себя малопредсказуемо – происходят различные сбои, устройство «зависает», начинает «глючить», одним словом перестает корректно выполнять свои функции. Инженеры и программисты постоянно борются с подобными явлениями, регулярно обновляя программное обеспечение своих продуктов и совершенствуя их аппаратную часть. Но одно дело, когда «завис» или показал «синий экран смерти» домашний компьютер или ноутбук, и совсем другое дело – когда перестал функционировать тот же банкомат, подстанция сотовой связи, мощный сервер в центре обработки данных или сетевая камера видеонаблюдения.
В первом случае все решается простым нажатием кнопки «Сброс» или кратковременным выключением прибора из сети, а со вторым случаем все сложнее. А что, если тот самый банкомат или видеокамера находятся за многие сотни или даже тысячи километров от администратора системы?
Выход напрашивается сам собой – приставить к каждому устройству персонального смотрителя, который будет неустанно следить за его работоспособностью и вовремя нажимать нужные кнопки в случае сбоя. Но не все так просто.
Во-первых, не стоит забывать о пресловутом «человеческом факторе», как мы уже говорили человек – существо несовершенное, может и отлучиться куда-нибудь, отвлечься или просто заснуть на посту.
Во-вторых, порой, финансовые затраты на персонального сторожа для каждого устройства будут обходиться гораздо дороже самого этого устройства, что весьма расточительно, а в комплексе с первым утверждением вообще малоэффективно.
Есть еще способ. Практически во все современные устройства, работающие под управлением контроллера (процессора) и содержащие управляющую микропрограмму или операционную систему, встраиваются т.н. «Сторожевые таймеры» (англ. WatchDog – Сторожевой Пёс).
По своей сути они могут быть как программными, так и аппаратными, встроенными в микроконтроллер или иную микросхему внутри устройства.
Основная задача таких таймеров – своевременный перезапуск «зависшего» оборудования с целью восстановления его работоспособности.
Если в течение определенного времени или определенного в программе числа циклов операционная система устройства или порт микроконтроллера не отвечают на запросы таймера, устройству посылается команда сброса и перезагрузки.
Несомненно, это весьма удобно и не требует таких больших затрат, как содержание штата сотрудников, следящих за каждым прибором, но и тут есть большой минус. Те сторожевые таймеры, про которые велась речь выше – встроены непосредственно в логику контролируемого прибора. И в этом их основной недостаток. При определенных условиях эти таймеры, независимо от того, аппаратно они реализованы или программно, могут «зависнуть» вместе со всем устройством. И тогда польза такого электронного сторожа будет нулевой – его самого придется сбрасывать вместе со всей начинкой подконтрольного прибора.
Есть еще одно условие – иногда подачи только сигнала «Сброс» оказывается недостаточно, и для полного восстановления работоспособности устройства его необходимо на некоторое время полностью обесточить. Например, если по какой-то причине сработала защита встроенного в сетевую видеокамеру преобразователя питания? Устройство просто выключится, и сторожевой таймер тоже, следовательно, выходом из положения будет только кратковременное прекращение подачи напряжения питания на камеру с дальнейшим его восстановлением.
Итак, каким же должен быть оптимальный WatchDog?
Он должен быть независимым от контролируемого устройства, автономным, надежным, гибко программируемым и, самое главное, с возможностью дистанционного управления для того, чтобы оператор или администратор имели возможность при малейшем подозрении на неправильную работу контролируемого оборудования принять меры по исправлению ситуации. Так есть ли оптимальное решение? Конечно же, есть.
Вот список всех методов определения работоспособности оборудования, используемых в сторожевых таймерах HW group:
Ping Push: В этом режиме IP WatchDog через определенные интервалы времени отправляет на заданный IP-адрес запросы PING, тем самым определяя, откликается ли на них контролируемое устройство. В случае, если отклик от устройства не был получен, сработают контакты реле и, к примеру, будет произведена его перезагрузка. Данный метод очень удобен для мониторинга состояния сетевых видеокамер, маршрутизаторов, сетевых коммутаторов и т.п.
Ping Request: В отличии от предыдущего режима, IP WatchDog не посылает запросы PING, а ожидает таковых от контролируемого устройства. Хорошо подходит для использования в серверных и телекоммуникационных стойках, на вышках сотовой связи.
Web Push: Эта функция доступна только для IP WatchDog HWg-WR02a. Ее суть заключается в том, что сторожевой таймер периодически запрашивает определенную Web-страницу с указанного пользователем адреса. Это очень удобный метод контроля работоспособности Web-серверов – при отсутствии или недоступности запрашиваемой страницы (известная всем «Ошибка 404») сервер будет своевременно перезапущен.
Web Request: В данном режиме IP WatchDog ожидает от контролируемого устройства запроса своей внутренней Web-страницы. Если страница не будет запрошена в течение определяемого пользователем интервала времени – устройство будет перезапущено. Метод так же удобен для контроля состояния Web-серверов. Доступна эта функция только в обновленном IP WatchDog HWg-WR02a.
RS232 Rx: Как уже упоминалось выше, в этом режиме сторожевой таймер будет ожидать от подключенного к нему устройства определенную последовательность символов, переданную посредством стандартного порта RS-232.
Аппаратный «watchdog» или незаменимый помощник в борьбе с зависанием
В одной компании было много терминалов, и одна из неблагодарных задач для техподдержки — ездить по точкам и перезапускать операционную систему внутри терминалов. Было решено бросить вызов этой проблеме в виде разработки аппаратного сторожевого таймера.
В итоге мы получили устройство, которое подключается к расширительному спаренному USB-разъему на материнской плате.

Данное устройство имеет следующие возможности:
Алгоритм работы прост: внутри находятся два настраиваемых таймера, которые постоянно отсчитывают заданное время, по истечению которого имитируется нажатие соответствующих кнопок (POWER и RESET). Чтобы предотвратить случайную перезагрузку, необходимо периодически послать команду сброса таймера.
Лучше, чтобы за процедуру сброса таймеров отвечало целевое приложение, а не стороннее или системное (Cron, служба расписаний) по причине того, что вероятность сбоя в системе меньше, чем в приложении (хотя, у кого как).
Обмен информацией аналогичен консольному.
| команда | Описание | Пример |
|---|---|---|
| help | Краткая справка по командам | help |
| LED1 | Управление светодиодом, по умолчанию выключен | LED1 ON LED1 OFF |
| RELAY | Управление реле, по умолчанию включено | RELAY ON RELAY OFF |
| KEY1 | Имитация нажатия кнопки 1, по умолчанию не нажата | KEY1 ON KEY1 OFF |
| KEY2 | Имитация нажатия кнопки 2, по умолчанию не нажата | KEY2 ON KEY2 OFF |
| C1 | Управление таймером 1, связанным с кнопкой 1. Установка времени в секундах, максимальное значение 32767. Для отключения функции таймера, необходимо задать время равное 0. | C1 RES C1 SET 60 C1 SET 0 |
| C2 | Управление таймером 2, связанным с кнопкой 2. Установка времени в секундах, максимальное значение 32767. Для отключения функции таймера, необходимо задать время равное 0. | C2 RES C2 SET 60 C2 SET 0 |
| USB | Управление питанием USB, по умолчанию включено | USB ON USB OFF |
В случае удачного выполнения команды возвращает «OK».
В случае некорректных данных возвращает «ERROR».
Признаком конца строки служит символ возврата каретки «\r». Также поддерживается режим «\r\n».
Устройство выполнено на базе контроллера STM32F103CA с аппаратной поддержкой USB. Библиотека работы с USB версии V4.0.0. Напряжение работы 3.3В получаем с помощью линейного стабилизатора из 5В на USB. Во всех управляющих цепях используются транзисторы в ключевом режиме. Также не забываем про защитный диод от токов самоиндукции в катушки реле (в моем случае он оказался встроенным).
Watchdog Timer

| Доступные параметры | Enabled |
| Disabled(по умолчанию) |
Персональный компьютер или сервер имеют встроенный таймер операций – он называется WatchDog Timer или WDT (в русской компьютерной терминологии – контрольный таймер материнской платы). Необходим он потому как такая сложная техника, как компьютер имеет свойство сбоить и выходить из строя. Именно поэтому в неё зачастую встраивают различные независимые опции контроля и коррекции, в частности таймер операций, который ограничивают время, затрачиваемое системой ввода-вывода на одно действие(шаг).
В большинстве случаев контрольный таймер доступен прямо в BIOS-е. Впрочем, некоторые производители материнских плат страдают недоверием к пользователям и оснащают свои платы только самыми безопасными и «пользовательскими» функциями. Если вам так не повезло – увы, доступ к настройкам WDT вам закрыт. К счастью, таких производителей немного.
Как работает контрольный таймер
WDT запускается вместе со стартом системы и тут же начинает отслеживание её действий. Впрочем, некоторые модели плат имеют технологическую особенность: первый шаг WDT в них является холостым, а значит, по-настоящему работу таймер начнет только по прохождении 0,6 секунды. Стандартное значение WDT– 4h, что означает 4 шага. Если программа не успевает выполнить операцию за четыре шага (1,8 – 2,4 секунды) система принудительно останавливает её и производит корректировку программы. Ну или перезагружает/выключает компьютер, если эта программа системная. При этом вы получите BSoD (Blue Screenof Death) с описанием произошедшей ошибки, например DPC_WATCHDOG_VIOLATION.
Максимальное значение WDT– 3Fh, то есть 62 шага или 37,5 секунд, но устанавливать его не стоит: в случае какого-либо сбоя вы потеряете доступ к ПК не на жалкие две секунды, а почти на полминуты. К тому же любой современный ПК способен выполнить стандартную операцию меньше чем за секунду, а значит, даже двухсекундная задержка уже сбой.
Стоит ли включать эту опцию?
Да, определенно. WDT крайне необходим при работе с нестабильными или зараженными системами, так как он помогает находить и устранять программные и аппаратные ошибки, мешающие нормальной работе вашего ПК. Но вот если вы работаете с очень устаревшим оборудованием (или же невероятно сложными и/или плохо написанными программами), то значение WDT в BIOS стоит сделать побольше или же вообще выключить, если другие варианты не работают. Только помните, что в этом случае ваш компьютер может начать чаще зависать и тратить процессорное время на выполнение некорректно совершенных запросов.
AVR Урок 53. Watchdog Timer (WDT). Часть 1
Уже более года мною не публиковалось уроков по контроллерам AVR. На это были различного рода причины.
Во-первых, я считал, что основные виды периферии и прочих составляющих данного контроллера нами уже изучены.
Во-вторых, у меня не было и нет нормального программатора, который бы виделся в среде разработки полноправно. Уроки без этого снимать можно, но готовить проекты для них, поверьте, очень тяжело.
В-третьих, с выходом более современных контроллеров интерес к данным контроллерам упал, хоть и незначительно, но всё же это есть.
Несмотря на это, я всё же, взвесив все «за» и «против», всё же решил ещё раз попытать счастья и выложить пару уроков (пока пару, а там посмотрим, как дело пойдёт) по данным микроконтроллерам.
Что же всё-таки сподвигло меня на данный шаг?
Во-первых, многочисленные просьбы посетителей моего ресурса, а также просьбы в личных сообщениях.
Во-вторых, новый хозяин данного семейства контроллеров Microchip, включил эти контроллеры в свою среду разработки MPLAB X, что позволит нам теперь обойтись сразу на два семейства одной средой разработки.
В-третьих, также выявились определённые темы, которые не были освещены в моем предыдущем, как я считал до этого, вполне исчерпывающем курсе занятий по контроллерам AVR.
И вот одним из неизведанных ещё нами модулей оказался модуль Watchdog Timer (WDT), который, как оказалось, много где используется и выполняет очень важные роли в работе программ. Тем более, меня ранее многие просили сделать по нему урок, но я либо недопонимал ценность данной периферии, либо был увлечён чем-то другим.
Вот и настало время наконец-то восполнить данный пробел.
Watchdog Timer (WDT) – это сторожевой таймер (а если перевести дословно, «сторожевой пёс»), который представляет собой аппаратно-реализованную схему контроля над зависанием системы. Это таймер, который периодически сбрасывается контролируемой системой. Если вдруг сброса не произошло за определённый интервал времени после предыдущего сброса данного таймера, то происходит принудительная перезагрузка системы (в нашем случае микроконтроллера).
В каких конкретных случаях мы можем применить данный таймер?
Например, мы ждём ответа от какой-нибудь шины (например I2C или ещё какой-то) в виде отслеживания состояния определённого бита регистра. И вдруг произойдёт кратковременное отсоединение провода этой шины. После этого скорей всего произойдёт зависание программы, так как в шине будет сбой, и даже если что-то после и придёт от присоединённого узла, то мы вряд ли уже это отследим изменением состояния бита. Желательно, чтобы после какого-то таймаута система перезагрузилась. Тут-то и приходит нам на помощь WDT, который установлен на определённый интервал. Команду на перезагрузку сторожевого таймера мы расположим в нашем коде после того, как мы дождёмся отклика от шины. А если мы так его и не дождёмся, то мы не дойдём до команды перезагрузки WDT и через заветный интервал времени система будет перезагружена. После этого произойдёт заново инициализация шины и всё будет опять работать нормально.
Понятно, что данная ситуация подходит только для случая, когда нам приходится не слишком долго ждать отклика от устройств, то есть именно тогда, когда у нас существует какой-то непрерывный процесс, в котором есть возможность ситуации сбоя. Таких примеров можно придумать много, поэтому Watchdog Timer очень много где применяется.
При работе с таймером в нашем коде мы не будем напрямую работать с его регистрами, так как там ещё надо проделывать очень много различных подготовительных мероприятий. Для этого существует отличная библиотека wdt.h, которая находится в стандартном комплекте для AVR и не требует дополнительного подключения откуда-то. Но тем не менее о том, как именно устроен сторожевой таймер в контроллере ATMega328, которым мы и будем сегодня пользоваться, мы всё же поговорим.
Таймер питается от отдельного генератора, который вместе с ним входит в логику перезагрузки контроллера

А вот это диаграмма сброса контроллера по истечении интервала времени
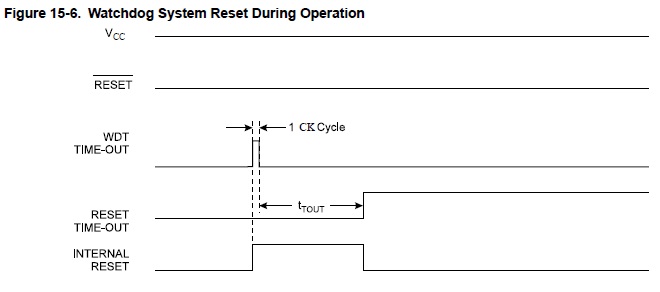
Кроме того, что мы можем сбросить сторожевой таймер где-то в коде, мы можем также и отследить окончание интервала времени по прерыванию, которое надо включить отдельно.
WDT, как и было указано выше, работает от отдельного генератора.
Также следует отметить, что диапазон интервалов данного таймера не бесконечен.
Давайте посмотрим блок-схему WDT
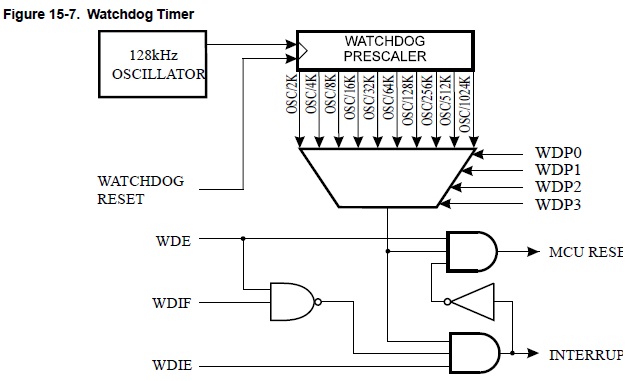
На рисунке мы видим, что после генератора на 128 килогерц, сигнал проходит на предделитель, который содержит 10 различных выходов с различным коэффициентом деления. Предделитель настраивается с помощью битов WDP3:WDP0 регистра WDTCSR. Таким образом, интервал времени работы WDT лежит в диапазоне от 15 милисекунд до 8 секунд.
Также мы видим, что с помощью бита WDIE мы можем разрешить прерывания от сторожевого таймера и затем попасть в обработчик, отслеживая состояние бита WDIF. Включается таймер с помощью бита WDE.
Вот он – управляющий регистр сторожевого таймера

Хоть мы уже и говорили о битах данного регистра выше, но всё же давайте все их рассмотрим подробно, их не так и много, так как у таймера всего один регистр
WDIF (Watchdog Interrupt Flag): флаг прерывания. Устанавливается в 1 в случае истечения интервала времени таймера. Сбрасывается аппаратно.
WDIE (Watchdog Interrupt Enable): бит разрешения прерываний от таймера. если установлен в 1, то прерывания разрешены, если в 0 – запрещены.
Существует таблица зависимости от состояния бетов WDE, WDIE, а также фьюза WDTON
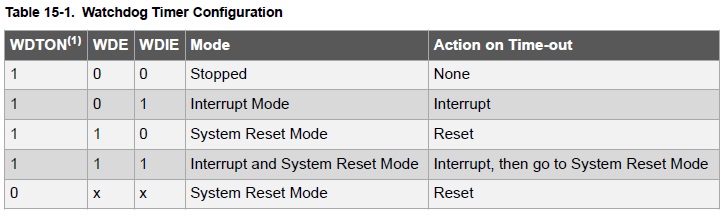
Из данной таблицы очень интересно то, что для того, чтобы работать с прерываниями от сторожевого таймера, его не обязательно включать. Достаточно лишь разрешить от него прерывания. Только если не включать, то прерывания работать будут, но таймер при этом не будет перезагружать систему.
WDP2:WDP0 (Watchdog Timer Prescaler): биты, устанавливающие коэффициент деления предделителя сторожевого таймера.
Вот таблица возможных комбинаций данных битов

Здесь также даны сами интервалы в единицах времени.
WDCE (Watchdog Change Enable): бит изменения, который должен быть предварительно включен перед тем, как мы соберёмся внести изменения в предделитель с целью изменения коэффициента деления либо для отключения таймера путём занесения в бит WDE значения 0. Сбрасывается аппаратно после четырех тактов.
WDE (Watchdog System Reset Enable): бит включения таймера, а вернее бит включения режима перезагрузки системы по истечению интервала времени таймера WDT.
Ну вот, я думаю и всё насчёт теории по сторожевому таймеру. Если что-то пропустил, то исправим это в процессе сочинения кода.
Код наш выполнять будет следующие задачи.
У нас, помимо WDT, будет также работать ещё таймер TIM1, данный таймер будет работать по совпадению, следовательно в обработчик прерываний от него мы будем попадать через определённое время периодично. В обработчике таймера мы будем периодично включать 10 ножек различных портов, а состояние их на какой-то момент мы будем определять по светодиодам, которые мы к ним подключим. Вернее, мы подключим светодиодную планку с 10-ю светодиодами, не забывая конечно о токоограничивающих резисторах, которые я на всякий случай подключил на 680 Ом, при этом светодиоды светятся вполне ярко. В начале программы мы запустим наш сторожевой таймер WDT и зададим ему определённый интервал времени срабатывания. В процедуре обработки прерываний от таймера 1 мы будем своевременно сбрасывать сторожевой таймер, поэтому, если всё у нас будет нормально с ходом программы, то система у нас будет работать и не перезагрузится.
А для того, чтобы проверить, перезагрузится ли наш WDT по истечению интервала, мы сэмулируем ситуацию, что наш таймер перестанет работать. Для этого мы подключим кнопку к контакту INT0 и обработаем от неё внешнее прерывание, в обработчике которого мы запретим прерывания от нашего таймера. Светодиоды, соответственно перестанут бежать, тем самым сигнализируя нам о том, что наш таймер 1 «сломался». Поэтому сторожевой таймер не перезагрузится, тем самым перезагрузит нашу систему и весь процесс у нас начнётся заново.
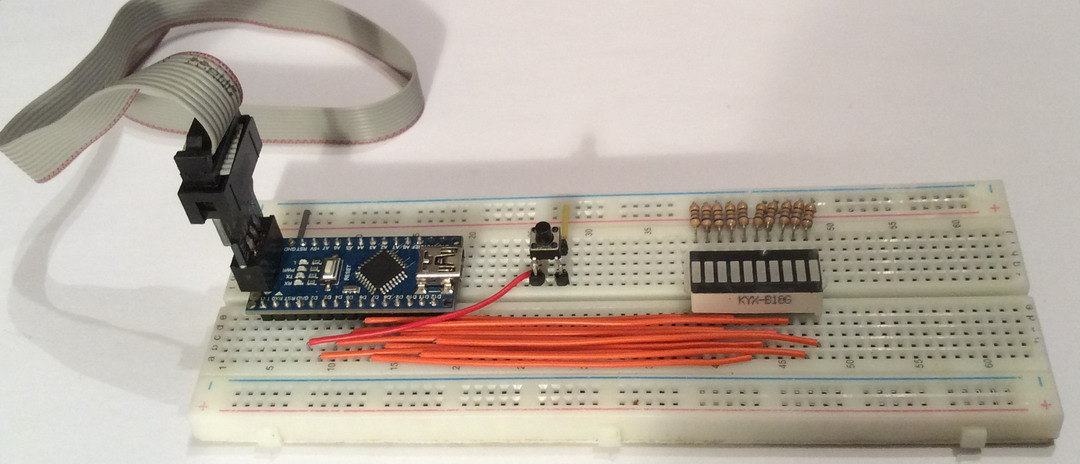
В качестве контроллера для урока мы возьмём контролер ATMega328P, расположенный на плате Arduino Nano, к которой подключим обычный USB-программатор через разъём ISP. Вставим нашу плату в макетную плату, подведём к ножке PD2 (INT0) кнопку, а также от ножек D3-D12 (ножки портов PD3:PD7, PB0:PB4) подключим аноды светодиодов планки, а катоды через токоограничивающие резисторы подключим к общему проводу
Проект мы создадим в среде программирования MPLAB X, с которой мы постоянно работаем с микроконтроллерами PIC, так как у данных контроллеров владелец один и тот же, то нет смысла использовать несколько сред для разработки. Как установить данную среду разработки, показано здесь.
Создание проекта по ссылке можно не смотреть, мы его все равно сейчас будем создавать заново.
Запустим среду программирования MPLAB X и запустим создание проекта с помощью следующей кнопки
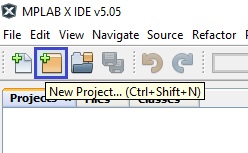
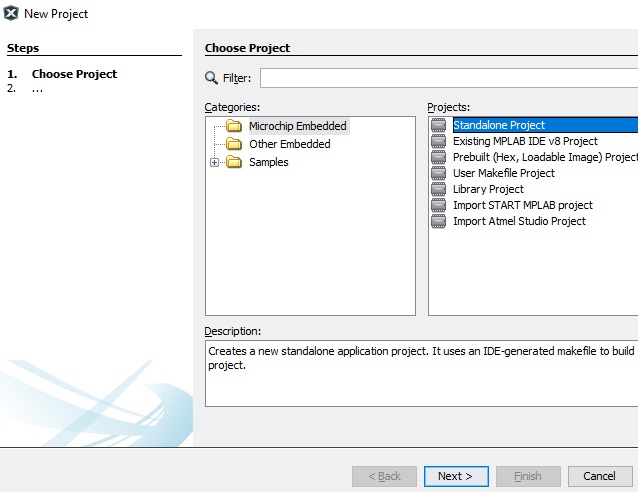
Выберем «Standalone Project» и идём далее
На следующем шаге выберем наш контроллер, перед этим отфильтровав контроллеры по семейству для удобства выбора, и движемся далее

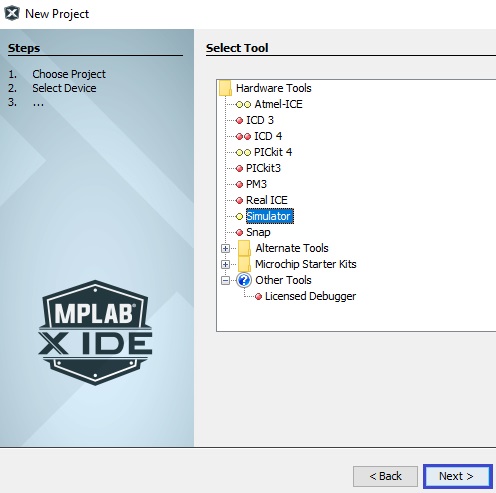
На следующем шаге в качестве программатора выберем Simulator и идём далее
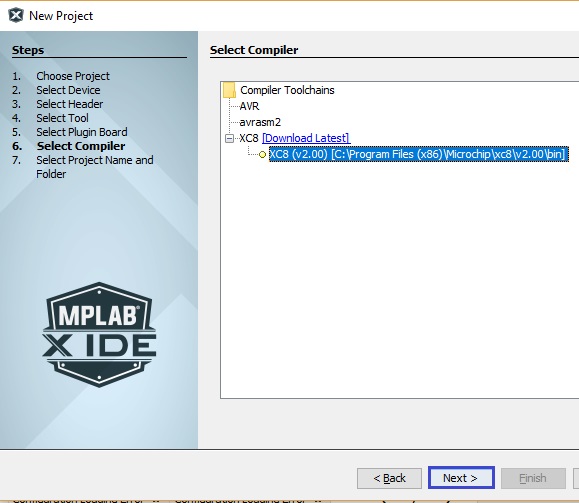
На следующем шаге выберем компилятор и идём дальше
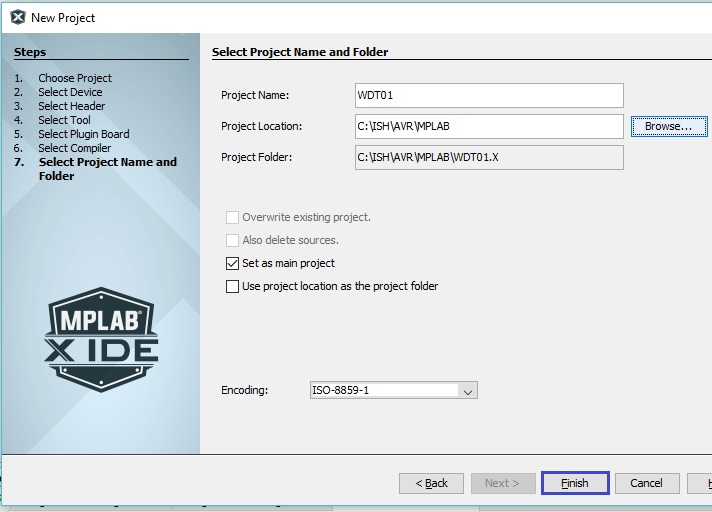
Дадим имя нашему проекту и жмём «Finish»
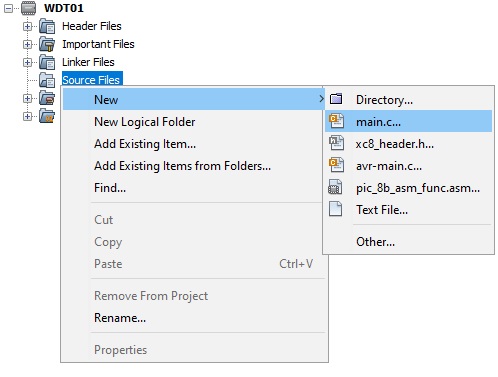
В дереве проекта в ветке Source Files добавим новый файл main.c с помощью контекстного меню на данной ветке
Исправим имя файла и нажмём «Finish»
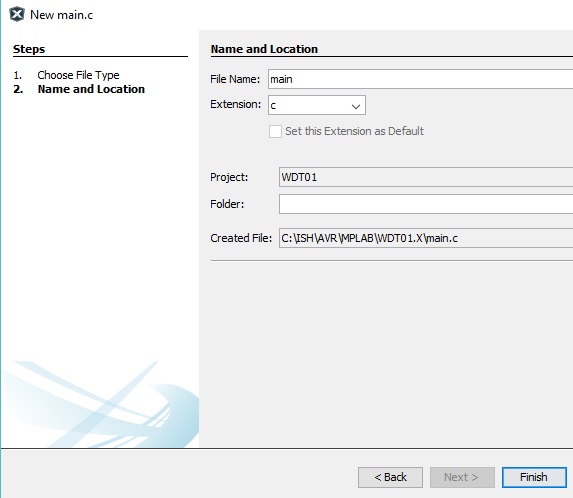
Файл main.c создан, чуть позже мы его исправим немного.
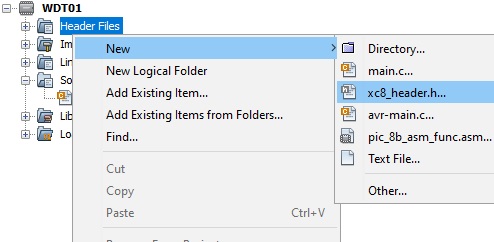
А пока создадим ещё заголовочный файл main.h аналогичным образом, только выбрав в контекстном меню на ветке «Header Files» и затем выбрав соответствующий пункт
Для нормального функционирования функции задержки зайдём в свойства проекта и откроем там настройки компилятора, в которых выберем настройку оптимизации
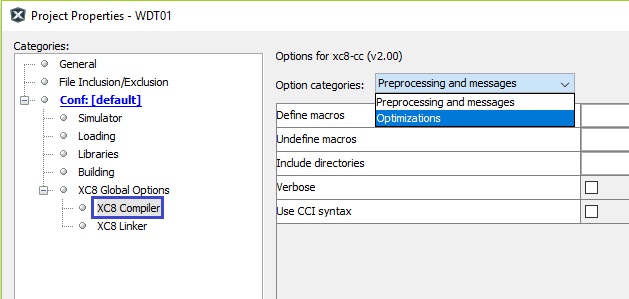
Оставим уровень оптимизации 0 и установим чекбокс на пункте Debug