mcu.by
Услуги разработки встраиваемого ПО и контрактная разработка электроники на ShuraCore
Старт ARM. Поднимаем USB CDC.
Всем привет! Сегодня будем поднимать USB CDC (VCP) на плате stm32f401c-disco.
USB communications device class (коммуникационный класс устройства) — является составным классом устройства Универсальной последовательной шины. Класс может включать один (или более) интерфейс, такой как интерфейс пользовательского элемента управления, интерфейс передачи данных, аудио или интерфейс запоминающего устройства.
VCP – Виртуальный COM-порт
Базовый класс 02h (Communications and CDC Control)
Этот базовый класс определен для устройств, которые относятся к классу устройств спецификации связи. Эта спецификация определяет используемый набор подкласса и Протокола значений. Значения за пределами определения спецификации защищены. Обратите внимание, что связи класса устройств спецификации требуется несколько значений Кода класса (три), которые будут использоваться в описания устройств, а некоторые, которые будут использоваться в интерфейсе дескрипторов.
Базовый класс 02h
Подкласс xxh
протокол xxh
смысл Communication device class
Базовый класс 0Ah (CDC-Data)
Этот базовый класс определен для устройств, которые относятся к классу устройств спецификации связи. Это спецификация определяет используемый набор подкласса и протокола значений. Значения за пределами определения спецификации защищены. Эти коды класса могут быть использованы только в интерфейсе дескрипторов.
Базовый класс 0Ah
Подкласс xxh
протокол xxh
смысл CDC data device



1. Находим строку HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0); и меняем на HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5);
2. Находим строку #define CDC_DATA_HS_MAX_PACKET_SIZE 512 /* Endpoint IN & OUT Packet size */ и меняем на #define CDC_DATA_HS_MAX_PACKET_SIZE 64 /* Endpoint IN & OUT Packet size */
3. Производим изменения в usbd_cdc_if.c
4. Теперь нужно добавить в usbd_cdc_if.h несколько строк кода
5. Устраняем баг для USBD_CDC_TransmitPacket()
6. И добавляем пример в main.c

И все готова!, подключаем микро USB к плате, второй вывод к host-у и у нас появляется виртуальный com порт.
6 thoughts on “ Старт ARM. Поднимаем USB CDC. ”
When i debbuged this code i found that for really big messages this doesn’t work right. There was some issue with size off offset. IT send multiple time the same think.
I corrected it with:
if (size > CDC_DATA_HS_OUT_PACKET_SIZE) <
int offset;
for (offset = 0; offset
with large data is not working, thanks
Точно, спасибо за инфу.
Есть одна проблема. Не передаются пакеты более 64 байт. Кто-нибудь решил ее?
Начинаем работать в STM32CubeMX. Часть 3
Продолжаем цикл про основы работы STM32MXCube и программированию микроконтроллеров STM32.

Небольшое вступление к третьей части
Вначале я хочу сказать, что с этой части я буду использовать отладочную плату NUCLEO-F767ZI. Эта плата более доступна, чем STM32F746G Discovery, использует микроконтроллер в корпусе LQFP144, а не BGA, и сама плата более удобна для встраивания в разные DIY-проекты. Она имеет Ethernet и USB, а также JTAG-отладчик. Недостатком платы является отсутствие LCD, но он нам пока не нужен.
Хотя плата имеет другой микроконтроллер, все проекты из предыдущих частей переносятся на неё почти без изменений (нужно только поменять номера пинов). Также следует учесть, что на этой плате микроконтроллер тактируется источником 8 МГц. Кварц для тактирования микроконтроллера предусмотрен схемой, но не распаян, сигнал 8 МГц снимается с JTAG-отладчика. Если ваш проект использует интерфейс USB, то желательно включать тактирование от HSE, а не от внутреннего RC-осциллятора, так как RC-осциллятор не обладает достаточной точностью и стабильностью частоты. При попытке включить RC-осциллятор при наличии в проекте USB, STM32CubeMX выдаст предупреждение и предложит переключиться на HSE (то есть на внешний высокостабильный источник тактирования). Для того, чтобы задействовать внешний источник тактирования (8МГц) на вкладке PinOut следует в пункте RCC включить HCE и выбрать пункт BYPASS Clock Source. На практике USB-интерфейс всё равно работает, даже от RC, но лучше не рисковать.
Я перевёл на эту плату проекты из предыдущих частей и залил их на гитхаб.
В комментариях к предыдущим частям были вопросы по поводу IDE. STM32CubeMX позволяет автоматически создавать проекты для различных IDE: IAR (EWARM), MDK ARM v4, MDK ARM v5, Atollic TRUEStudio, SW4STM32 и др. Я пользуюсь Atollic TRUEStudio, который доступен для скачивания с официального сайта бесплатно.
Также я проверил материал из предыдущих частей и внёс ряд поправок.
Хочу поблагодарить Shamrel за ценные комментарии к предыдущей части.
USB VCP
Одним из самых простых режимов работы USB является режим VCP — Virtual COM Port. Настройка работы с ним потребует от вас минимальных усилий.
В STM32CubeMX находим на вкладке Pinout раздел USB_OTG_FS и устанавливаем Mode=Device_Only:

В разделе USB_DEVICE устанавливаем Class For FS IP в режим CDC VCP (Communication Device Class Virtual Com Port):

Теперь нужно настроить конфигурацию тактирования так, чтобы частота USB составляла 48 MHz:
Идём дальше, на вкладку Configuration, и отключаем параметр VBUS Sensing:

Генерируем код и открываем проект в IDE.
Находим файл usbd_cdc_if.c и в него вставляем следующее:
Здесь реализован режим эха: всё, что приходит в порт, мы немедленно отправляем обратно.
Компилируем и прошиваем микроконтроллер. Затем подключаем разъём User USB платы к компьютеру. Система должна обнаружить новый COM-порт.
Для Linux: проверяем ls /dev/tty*, появилось устройство /dev/ttyACM0. Проверяем, и здесь нас ждут ещё сюрприз: отказано в доступе. Нужно добавить себя в группу dialout:
(где user — ваше имя пользователя)
Для работы с устройством в Windows вам понадобится скачать и установить драйвер. Для работы в OS X и Linux специальный драйвер не нужен.
Запускаем (например) Putty, настраиваем параметры порта. Они должны совпадать с параметрами, указанными в свойствах порта (см. «диспетчер устройств/порты»).
Пробуем открыть порт в Putty и что-то послать в порт:
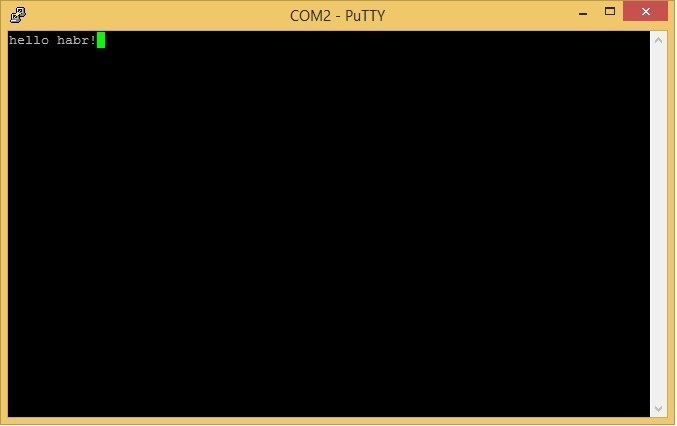
Если порт не открывается, можно попробовать выйти из режима отладки в IDE и перезапустить плату. Всё должно заработать.
как бороться с ошибкой код 10 виртуального порта?
Помогает в файле usbd_cdc.h вместо 512 поставить 256 в строке:
#define CDC_DATA_HS_MAX_PACKET_SIZE (512 было) 256 /* Endpoint IN & OUT Packet size */
Как мы увидели, работа с USB в режиме виртуального COM-порта очень проста. Единственный недостаток этого режима — очень низкая скорость передачи данных. Интерфейс USB в режиме Full Speed обеспечивает до 12 Мбит/c, в режиме High Speed — до 480 Мбит/c, но VCP ограничивает скорость жалкими 128 кбит/c.
Можно сделать высокую скорость передачи данных, но пока отложим это до следующего раза.
Сейчас попробуем запустить АЦП, получить с него значения и отправить на компьютер, реализовав очень простой (и очень медленный) «осциллограф». Чтобы было интереснее, мы подадим на АЦП синусоидальный сигнал, сформированный ЦАП. Так как мы уже делали это в прошлой части, я просто скопирую код в новый проект (с небольшими изменениями, которые большой роли не играют).
Сначала немного об АЦП, встроенном в микроконтроллер. Микроконтроллер STM32F767ZI имеет три 12-разрядных АЦП, типа SAR (последовательного приближения), имеющие производительность до 2 MSPS (млн. выборок в секунду). Этот тип АЦП отличается высокой скоростью преобразования, но меньшей точностью, чем сигма-дельта АЦП. Вход опорного напряжения VREF соединён с VDDA, и, через индуктивность, с VDD. Таким образом, опорное напряжение в нашем случае равно 3,3В. Особенностью SAR ADC является использование на входе схемы выборки-хранения, содержащей конденсатор. В момент выборки значения сигнала конденсатор подключается ко входу и заряжается до величины входного сигнала. Если источник сигнала будет иметь слишком большое внутреннее сопротивление, конденсатор не успеет зарядиться полностью, и мы получим заниженное значение. Этот и другие моменты использования АЦП изложены в [1].
АЦП данного микроконтроллера имеет множество режимов работы [2], мы рассмотрим только один из них. Попробуем получить одновременно два значения сигнала с двух АЦП, строго синхронно, и записать их в буфер через DMA.
Итак, создаём новый проект, добавляем в него уже готовый код для генерации синусоиды на DAC и для USB VCP (через него мы будем отсылать данные на компьютер). Далее (проводами) соединяем выход ЦАП с входами АЦП1 и АЦП2. Для того, чтобы как-то различать сигналы на аналоговых входах, я соединил АЦП1 c ЦАП напрямую, а АЦП2 — через делитель напряжения на переменном резисторе, чтобы можно было менять амплитуду сигнала.
Если вы будете подавать на вход АЦП сигнал от внешнего источника, следует помнить, что сигнал на любом входе микроконтроллера должен быть ограничен значениями 0 — Vcc, что в большинстве практических случаев приводит к необходимости сдвига и усиления (или ослабления) сигнала.
Также следует учесть, что в микроконтроллерах STM32 используются АЦП последовательного приближения (SAR), которые потребляют от источника сигнала довольно большой ток в момент измерения, и требуют источника сигнала с низким импедансом.
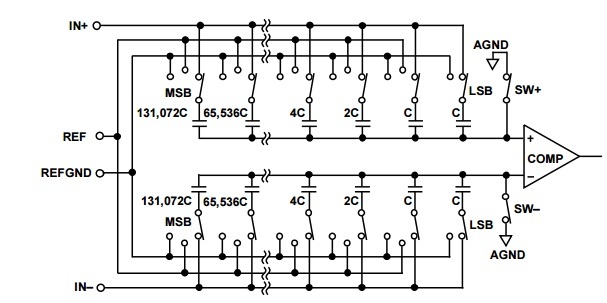
Рис. 1. Схема выборки-хранения SAR ADC (не из STM32, но совершенно аналогичный)
В моменты выборки сигнала конденсаторы (рис. 1) подключаются ко входу АЦП и должны зарядиться до полного уровня сигнала за очень короткое время, потребляя при этом значительный ток. Если источник сигнала будет иметь большое сопротивление, они не успеют зарядиться, и показания АЦП будут неверными. На практике это означает, что мы должны в большинстве случаев использовать внешний буферный усилитель. Так как сегодня мы сосредоточимся на программных аспектах задачи, мы можем обойтись без усилителя, но следует помнить, что без усилителя показания АЦП будут существенно искажены, и в реальных проектах он нужен.
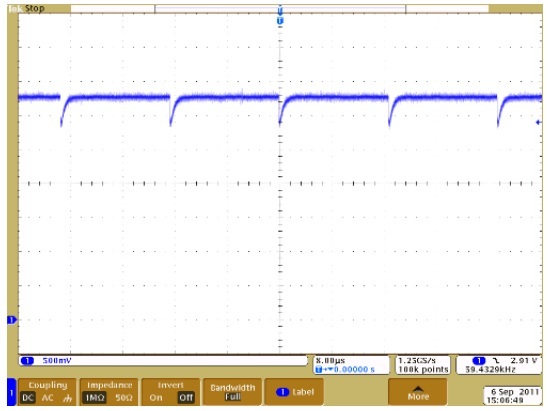
Рис. 2. Схема выборки-хранения вызывает провалы уровня сигнала на входе АЦП.
К сожалению, в документации STM32 эти вопросы рассмотрены слабо, но я могу порекомендовать руководство [3].
Если читателям будет интересно, я могу рассмотреть основы схемотехники аналоговых узлов сопряжения сигналов с АЦП в следующей статье.
Нам нужны будут в нашем проекте два таймера. Один из них будет задавать период работы ЦАП, второй — АЦП. Настроим аналого-цифровой преобразователь на работу в двухканальном режиме с одновременной выборкой. Выборка будет происходить по таймеру TIM2. Полученные значения будут складываться в буфер с помощью DMA.
Мы будем использовать однократный режим работы DMA (есть также циклический, с ним мы уже познакомились при изучении ЦАП). После того, как буфер заполнится значениями с АЦП, мы копируем его содержимое в другой буфер (с некоторой обработкой), передаём его через USB и запускаем процесс снова. Также для отладки и индикации режима работы мы используем два порта GPIO, к которым подключены светодиоды.
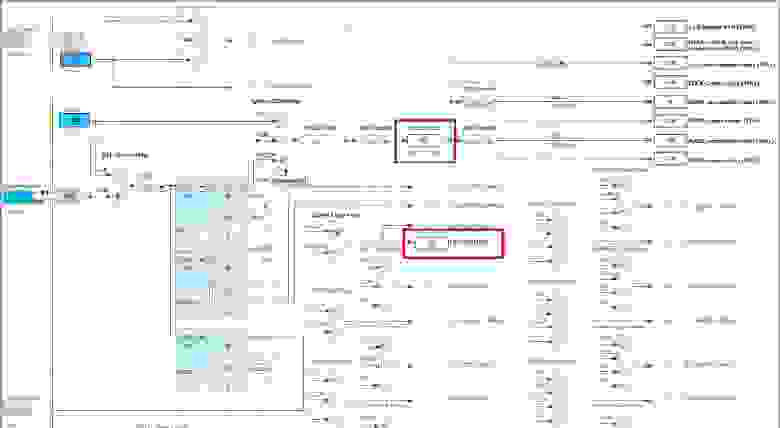
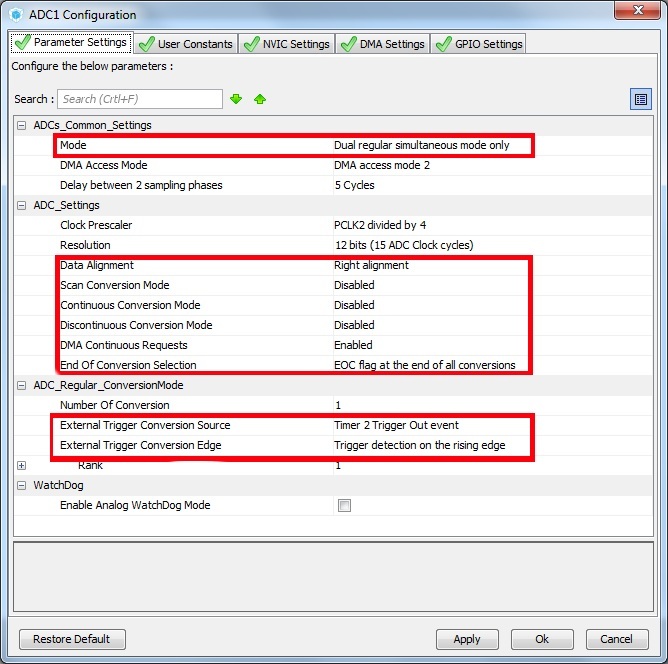
Итак, у нас создан проект, в который мы добавили DAC и таймер TIM1. Ещё нам нужно добавить ADC1 (вход IN9), ADC2 (вход IN12) и таймер TIM2. Также нам понадобится USB_OTG_FS.
Настраиваем ADC1 на работу в режиме одновременной выборки, с запуском по таймеру 2:
ADC2 при этом настраивается автоматически:
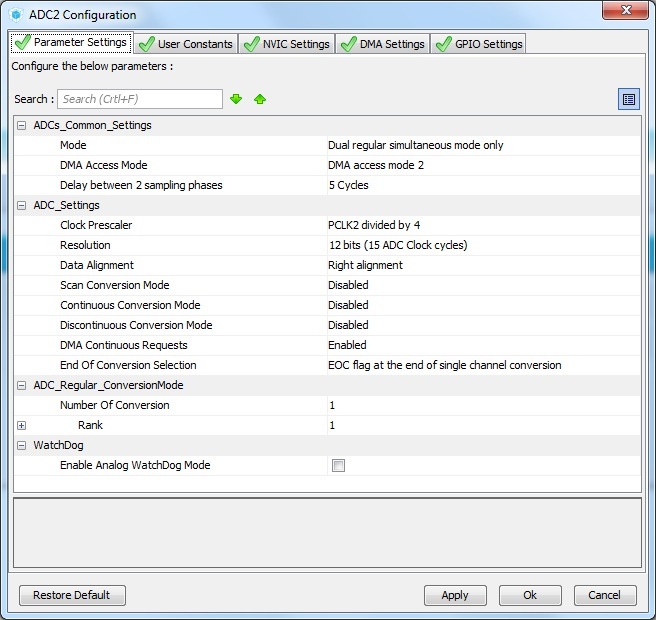

Обращаем внимание, что размер передаваемых данных Word, а не Half Word, т.к. за один раз передаются данные с двух АЦП, упакованные в 32-битное слово. Настраиваем таймер TIM2:

USB настраиваем так же, как мы это уже делали. Генерируем код.
Я не буду здесь расписывать весь исходник проекта, остановлюсь лишь на ключевых моментах. Запуск цепочки таймер-ADC-DMA:
Почему мы не можем передать через USB непосредственно содержимое исходного буфера? Так как скорость VCP слишком мала, мы не сможем передавать весь поток данных с АЦП. Мы захватываем кусок сигнала, передаём его «наверх», потом захватываем следующий кусок и т. д. Если мы не предпримем специальных мер, то в порт будут передаваться случайные фрагменты исходного сигнала. Поэтому нужно сделать программный аналог «триггера», как у цифрового осциллографа. Мы будем передавать в порт не рандомный фрагмент, захваченный АЦП, а кусок сигнала после возникновения некоторого условия. Таким условием может быть пересечение сигналом некоторого уровня в направлении снизу вверх: sample0_0 = threshold, где threshold — порог срабатывания.
Именно для этого мы делаем буфер АЦП в два раза больше буфера VCP, и просматриваем его до середины в поисках такого условия. Если условие не наступило, не отправляем в порт ничего, и запускаем следующий цикл АЦП.
DMA упаковывает сигналы с двух АЦП в одно 32-битное слово. Не будем менять этот формат, просто добавим единицу в старший разряд первого отчёта в буфере, чтобы ПО верхнего уровня могло распознать начало «кадра»:
Для отображения сигнала на компьютере я написал маленькую программу на C#:

Она в основном собрана из компонентов в Visual Studio и содержит минимум кода. Её исходники также доступны на Github.
Что дальше
В следующей части мы рассмотрим интерфейс Ethernet и немного операционную систему реального времени FreeRTOS.

Ссылки
Исходники проектов к всему циклу статей можно скачать на github. Все проекты сделаны для платы Nucleo F767ZI и используют IDE Atollic TRUEStudio.
Благодарю за внимание, о замеченных ошибках и опечатках прошу сообщать в личку. Продолжение следует.
Stm32 + USB на шаблонах C++. Продолжение. Делаем CDC
Продолжаю разработку полностью шаблонной библиотеки под микроконтроллеры Stm32, в прошлой статье рассказал об успешной (почти) реализации HID устройства. Еще одним популярным классом USB является виртуальный COM-порт (VCP) из класса CDC. Популярность объясняется тем, что обмен данными осуществляется аналогично привычному и простому последовательному протоколу UART, однако снимает необходимость установки в устройство отдельного преобразователя.
Интерфейсы
Устройство класса CDC должно поддерживать два интерфейса: интерфейс для управления параметрами соединения и интерфейс обмена данными.
Интерфейс управления представляет собой расширение базового класса интерфейса с тем отличием, что содержит одну конечную точку (хотя, насколько я понял, без необходимости поддержки всех возможностей можно обойтись вообще без конечной точки) и набор «функциональностей», определяющих возможности устройства. В рамках разрабатываемой библиотеки данный интерфейс представлен следующим классом:
В базовом случае интерфейс должен поддерживать три управляющих (setup) пакета:
SET_LINE_CODING: установка параметров линии: Baudrate, Stop Bits, Parity, Data bits. Некоторые проекты, на которые я ориентировался (основным источников вдохновения стал этот проект), игнорируют данный пакет, однако в этом случае некоторые терминалы (например, Putty), отказываются работать.
GET_LINE_CODING: обратная операция, в ответ на эту команду устройство должно вернуть текущие параметры.
SET_CONTROL_LINE_STATE: установка состояния линии (RTS, DTR и т.д.).
Код обработчика setup-пакетов:
Ключевой момент нумерации, а именно формирование дескрипторов, выполнен по уже привычной схеме раскрытия variadic-ов, что позволяет избавиться от зависимости классов в иерархии:
Второй интерфейс, предназначенный для непосредственно обмена данными, абсолютно примитивный, он не должен поддерживать управляющих сообщений, а является просто контейнером для двух конечный точек (точнее одной двунаправленной). Объявление класса:
Поскольку мои познания в CDC-устройствах весьма небольшие, из просмотренных примеров я сделал вывод, что управляющий интерфейс почти всегда одинаковый и содержит 4 функциональности: Header, CallManagement, ACM, Union, поэтому добавил упрощенный шаблон интерфейса:
Применение разработанных классов
Для использования разработанных классов достаточно объявить две конечные точки (Interrupt для первого интерфейса и двунаправленную Bulk для второго), объявить оба интерфейса, конфигурацию с ними и, наконец, инстанцировать класс устройства:
Непосредственно логика заключается лишь в обработке входящих пакетов, что умещается в одну функцию (в качестве примера управляю светодиодом и выдаю сообщение):
Отладка и тестирование
Написать код правильно с первого раза практически невозможно, поэтому очень полезным оказалось все-таки разобраться с инструментами перехвата USB-пакетов, поэтому кратко опишу особенности и проблемы, с которыми столкнулся лично я.
Так и не удалось применить логический анализатор, он просто ничего не показывает. Полагаю, что дело в том, что это самый дешевый клон Seale Logic и если бы был в наличи нормальный аппарат, то все бы получилось. Главное преимущество логического анализатора заключается в том, что он позволяет отслеживать обмен данными еще в процессе нумерации, в то время как программы на стороне хоста показывают пакеты только для тех устройств, которые эту нумерацию успешно прошли.
Сначала отфильтровать по заведомо известному значению. Например, по значению PID, которое присутствует в ответе устройства на запрос GET_DEVICE_DESCRIPTOR. Фильтр: «usb.idProduct == 0x5711». Это позволит быстро определить адрес устройства.
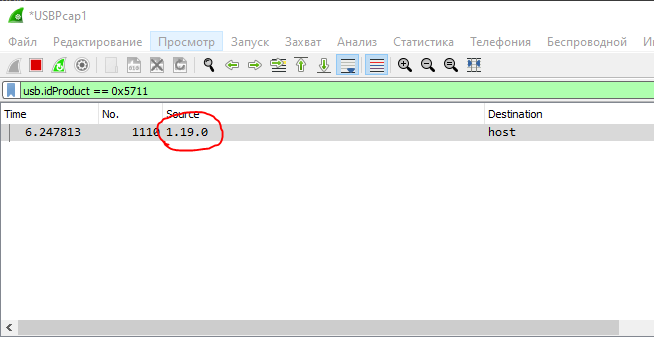
Далее отфильтровать по адресу устройства с помощью оператора contains. Дело в том, что отображаемый адрес состоит из трех частей, последняя из которых является номером конечной точки (можно, конечно, перечислить все адреса). Фильтр: «usb.addr contains «1.19»».

Однако стоит заметить, что UsbPcap может доставить некоторые трудности, под катом опишу ситуацию, в которую недавно попал и потратил кучу времени и нервов.
Проблема с usbpcap
Для большей мобильности завел себе внешний SSD, на котором установлена Windows 10 To Go (Windows, предназначенная для установки на внешние носители). Хотя Microsoft вроде отказалась от поддержки этой технологии, в целом все работает. Прихожу с диском в новое место, гружусь с него, система подтягивает драйвера и все нормально (и быстро) работает.
Однажды Windows просто не загрузилась с синим экраном «inaccessible boot device». Потратил целые выходные, восстановить так и не смог, пришлось все переустановить. Через некоторое время та же проблема и снова потраченные на переустановку выходные. Спустя пару дней система опять не грузится, начал вспоминать и анализировать, что я такого делал. Выяснил, что проблема возникала после установки как раз WireShark с usbpcap. На одном из форумов наткнулся на сообщение от пользователя, который жаловался на проблему с мышкой/клавиатурой после установки usbpcap. Снес через LiveCD драйвер и Windows запустилась. Не уверен на 100%, но предположение такое: при запуске компьютера Windows начинается загружаться, подгружает драйвера usbpcap, тот блокирует USB, система дальше грузиться не может и падает в BSOD. Очень неочевидное поведение, жаль потраченного времени.
Тестировал написанный код в программе Terminal v1.9b, на скриншоте приведен результат отправки на устройство сообщений «0» и «1».

Полный код примера можно посмотреть в репозитории. Пример протестирован на STM32F072B-DISCO. Как и в случае с HID, громоздкая библиотека (особенно менеджер конечных точек) сильно облегчили реализацию поддержки CDC, на все ушел примерно полный день. Далее планирую добавить еще класс Mass Storage Device, и на этом, наверно, можно остановиться. Приветствую вопросы и замечания.
CDC+MSC USB Composite Device на STM32 HAL
Мне хотелось бы верить, что хотя бы половина читателей может расшифровать хотя бы половину названия статьи 🙂 Кто не в курсе — поясню. Мое устройство должно реализовывать сразу две USB функции:
Я буду описывать создание композитного USB устройства на базе микроконтроллера STM32, но сам подход будет также применим и для других микроконтроллеров. В статье я детально разберу каждый из классов по отдельности, так и принцип построения композитных устройств. Но обо все по порядку.
Немного теории
Интерфейс USB очень сложный, многоуровневый и многогранный. С наскоку его не осилить. В одной из статей (забыл, правда, в какой) видел фразу в стиле “прочитайте эту статью 2 раза, а потом на утро еще раз”. Да, он такой, с первого раза точно не осилишь. Лично у меня интерфейс более-менее разложился по полочкам только через пару месяцев активного копания и чтения спецификаций.
Я по прежнему не являюсь экспертом в USB, а потому рекомендовал бы обратиться к статьям, которые бы детальнее рассказали суть происходящего. Я лишь укажу на самые важные места и вкратце поясню как оно работает — по большей части во что вляпался сам. В первую очередь я бы рекомендовал Usb in a nutshell (перевод), а также USB Made Simple (сам не читал, но многие рекомендуют). Также нам понадобятся спецификации для конкретных классов USB устройств.
Наверное, самой главной штукой в интерфейсе USB является дескриптор. Точнее даже пакет дескрипторов. Когда устройство подключается к шине хост запрашивает дескрипторы устройства, которые описывают возможности устройства, скорости обмена, частоту опроса, какие интерфейсы реализовывает устройство и много чего другого. Дескриптор штука важная и весьма нежная — даже ошибка в одном байте приведет к тому, что устройство работать не будет.
Еще нужно понимать, что USB это хост ориентированный протокол. Настройка устройства, прием, передача — все в USB управляется со стороны хоста. Для нас это означает, что со стороны микроконтроллера нет никакого потока управления — вся работа с USB построена на прерываниях и обратных вызовах (callback). А это, в свою очередь, означает что нам не желательно запускать долгоиграющие операции и нужно быть очень аккуратными при взаимодействии с другими прерываниями (учитывать приоритет, и все такое прочее). Впрочем, попробуем не опускаться на такой низкий уровень.
Также хост-ориентированность проявляется еще и в названии функций. В терминологии USB направление от хоста к устройству называется OUT, хотя для контроллера это прием. И наоборот, направление от устройства к хосту называется IN, хотя для нас это означает отправку данных. Так что в микроконтроллере функция DataOut() на самом деле принимает данные, а DataIn() — отправляет. Но это так, к слову — мы будем пользоваться уже готовым кодом.
CDC — виртуальный COM порт
Наверное взять и сразу наваять композитное устройство целиком не выйдет — слишком много нюансов и подводных камней. Я думаю лучше будет сначала отладить каждый интерфейс в отдельности, а потом переходить к композитному устройству. Начну с CDC, т.к. он не требует никаких зависимостей.
Я недавно переехал на STM32 Cube — пакет низкоуровневых драйверов для STM32. В нем есть код по управлению USB с реализацией отдельных классов USB устройств. Возьмем шаблонные реализации USB Core и CDC и начнем пилить под себя. Заготовки лежат в директории \Middlewares\ST\STM32_USB_Device_Library. Я использую Cube для контроллеров серии STM32F1, версия Cube — 1.6 (Апрель 2017), версия библиотеки USB из комплекта — 2.4.2 (декабрь 2015)
Шаблонная реализация библиотеки подразумевает написание собственного кода в файлах с названием template. Без понимания всей библиотеки и принципов работы USB это сделать достаточно сложно. Но мы пойдем проще — сгенерируем эти файлы с помощью графического конфигуратора CubeMX.
Реализация предоставленная CubeMX готова к работе прямо из коробки. Аж даже немного обидно, что не пришлось писать никакого кода. Придется изучать CDC на примере полностью готовой реализации. Давайте взглянем на самые интересные места в сгенерированном коде.
Для начала заглянем в дескрипторы, которые находятся в файлах usbd_desc.c (дескриптор устройства) и usbd_cdc.c (дескрипторы конфигурации, интерфейсов, конечных точек). В статье usb in a nutshell (на русском) есть очень детальное описание всех дескрипторов. Не буду описывать каждое поле в отдельности, остановлюсь лишь на самых важных и интересных полях.
В этом интерфейсе живет только одна конечная точка (bNumEndpoints). Но прежде идет серия функциональных дескрипторов — настроек специфичных для данного класса устройств.
Тут сказано, что наше устройство не знает о понятии “звонок” (в смысле звонок по телефону), но при этом понимает команды параметров линии (скорость, стоп биты, DTR/CTS биты). Последний дескриптор описывает какой из двух интерфейсов CDC является управляющим, а где бегают данные. В общем, тут нам ничего не интересно и менять мы ничего не будем.
Тут сказано, что эта конечная точка используется для прерываний. Хост будет опрашивать устройство раз в 0x10 (16) мс с вопросом а не требует ли устройство внимания. Также через эту конечную точку будут ходить управляющие команды.
Описание второго интерфейса (там где данные бегают) будет попроще
В интерфейсе живут 2 конечные точки типа bulk — одна на прием, вторая на передачу. На самом деле в терминологии USB это одна конечная точка, просто двухсторонняя.
Как это все работает объяснять не буду, хотя бы потому что сам до конца не понимаю (например как хост узнает сколько данных нужно забирать со стороны устройства). Самое главное, что библиотека все реализует за нас. Давайте лучше посмотрим на архитектуру.
Эта функция инициализирует USB периферию микроконтроллера. Интереснее всего тут серия вызовов функции HAL_PCDEx_PMAConfig(). Дело в том, что на борту микроконтроллера находится цельных 512 байт памяти отведенных специально под буферы USB (эта память называется PMA — Packet Memory Area). Но поскольку заранее устройству неизвестно сколько будет конечных точек и какие будут их параметры, то эта память не распределена. Поэтому перед работой с USB память нужно распределить согласно выбранным параметрам.
Но вот что странно, объявляли только 2 конечные точки, а вызовов 5. Откуда взялись лишние? На самом деле лишних тут нет. Дело в том, что у каждого USB устройства обязательно должна быть одна двусторонняя конечная точка, через которую устройство инициализируется, а потом управляется. Эта конечная точка всегда имеет номер 0. Этой функции инициализируются не конечные точки, а буфера. Для нулевой конечной точки создаются 2 буфера — 0x00 на прием и 0x80 на передачу (старший бит указывает направление передачи, младшие — номер конечной точки). Оставшиеся 3 вызова описывают буфера для конечной точки 1 (прием и передача данных) и конечной точки 2 (прием команд и отсылка статуса — это происходит синхронно, поэтому буфер один)
Последний параметр в каждом вызове указывает смещение буфера конечной точки в общем буфере. На форумах видел вопросы «а что это за магическая константа 0x18 (начальный адрес первого буфера)?». Я детально рассмотрю этот вопрос позже. Сейчас лишь скажу, что первые 0x18 байт PMA памяти занимает таблица распределения буферов.
Но это все кишки и другие внутренности. А что снаружи?
Пользовательский код оперирует функциями приема и передачи, которые находятся в файле usbd_cdc_if.c. Чтобы устройство могло отправлять данные в виртуальный COM порт в сторону хоста нам предоставили функцию CDC_Transmit_FS()
С приемом чуть сложнее: ядро USB будет дергать функцию CDC_Receive_FS() по мере приема данных. В эту функцию нужно дописать свой код, который будет обрабатывать принятые данные. Или вызывать коллбек, который будет заниматься обработкой, например так:
Обращаю внимание, что эти функции работают с массивами байт без какой либо структуры. В моем случае мне нужно было отправлять строки. Чтобы это было делать удобно я написал аналог функции printf, которая форматировала строку и отправляла ее в порт. Чтобы повысить скорость я также озадачился двойной буферизацией. Подробнее тут в разделах “USB с двойной буферизацией” и “printf”.
Еще в этом же файле находятся функции инициализации/деинициализации виртуального COM порта, а также функция изменения параметров порта (скорость, четность, стоп биты и прочее). Реализация по умолчанию не ограничивает себя в скорости и это меня устраивает. Инициализация так же хороша. Оставим все как есть.
Финальный штрих — код, который это все запускает
Тут по очереди инициализируются разные уровни драйвера. Последняя команда включает USB прерывания. Важно понимать, что вся работа с USB происходит по запросу от хоста. В этом случае внутри драйвера вызывается прерывание, которое в свою очередь либо само обрабатывает запрос, либо делегирует это другому коду через коллбек.
Чтобы это все заработало нужен драйвер со стороны операционной системы. Как правило это стандартный драйвер и система может подхватить устройство без особой процедуры инсталляции. Насколько я понимаю у меня в системе уже был установлен Virtual COM Port драйвер от STM (поставился с ST Flash Utility) и мое устройство подхватилось самостоятельно. На линуксе также все завелось с полпинка.
MSC — запоминающее устройство
С драйвером CDC было все просто — устройство, как правило, само является конечным потребителем данных (например получает от хоста команды) или же генератором (например отправляет хосту показания датчиков).
С Mass Storage Class будет чуток сложнее. Драйвер MSC является всего лишь прослойкой между хостом и шиной USB с одной стороны, и запоминающим устройством с другой. Это может быть SD карта подключенная по SDIO, SPI Flash, может быть RAM Drive, дисковый накопитель, а может быть даже сетевой диск. В общем, в большинстве случаев запоминающее устройство будет представлено неким драйвером (как правило нетривиальным), который нам нужно будет состыковать с реализацией MSC.
Реализация MSC требует от хранилища определенного интерфейса — уметь читать и писать, отдавать свой размер и статус. Примерно такие же возможности предоставляет интерфейс драйвера SD карты библиотеки SdFat. Остается лишь написать адаптер, который приведет один интерфейс к другому.
С направлением движения определились. Займемся реализацией. Я опять воспользовался конфигуратором CubeMX и сгенерировал нужные файлы для компонента USB. Изучение начнем, конечно же, с дескрипторов.
Дескриптор устройства практически не изменился. Разница только в полях, определяющих класс устройства — теперь класс устройства в целом не задан (нули в bDeviceClass), а будет задаваться на уровне интерфейса (это требование спецификации ).
Очень похоже на аналогичный дескриптор из CDC — определяется количество интерфейсов (1) и параметры питания от шины (до 100 мА)
Дескриптор интерфейса объявляет 2 конечных точки (по одной в каждую сторону передачи). Также дескриптор определяет какой именно это подкласс Mass Storage — Bulk Only Transport. Я не нашел толкового описания что же именно это за подкласс такой. Предполагаю, что это устройство, которое общается только посредством двусторонней передачи данных через 2 конечные точки (тогда как другие модели могут использовать еще и прерывания). Протоколом в этом общении являются SCSI команды.
Тут определяются 2 конечные точки типа Bulk — интерфейс USB не гарантирует скорость по таким конечным точкам, зато гарантирует доставку данных. Размер пакета устанавливается в 64 байта.
Раз уж мы говорим про конечные точки, то стоит заглянуть в файл usbd_conf.c где определяются соответствующие PMA буфера
Теперь посмотрим на MSC с другой стороны. Этот USB класс принимает от хоста команды на чтение/запись и транслирует их специализированный интерфейс — USBD_StorageTypeDef. Нам остается только подставить свою реализацию.
Поскольку это C, а не C++, то каждая их этих записей — указатель на соответствующую функцию. Как я уже говорил, нам нужно написать адаптер, который будет приводить интерфейс MSC к интерфейсу SD карты.
Начнем реализовывать интерфейс. Первой идет функция инициализации
Так SD карту можно было бы инициализировать прямо отсюда, если бы это была быстрая операция. Но в случае SD карты это может быть не всегда так. К тому же не стоит забывать, что эти все функции являются коллбеками и вызываются из прерывания USB, а прерывания надолго блокировать не стОит. Поэтому я вызвают функцию initSD() прямо из main() перед инициализацией USB, а SD_MSC_Init() у меня ничего не делает
Может показаться, что слишком много разных драйверов, но позвольте я напомню архитектуру. Класс SdSpiCard из библиотеки SdFat знает как общаться с SD картой через SPI, когда и какую команду послать и какой ждать ответ. Но он не знает как работать с самим SPI. Для этих целей я написал класс SdFatSPIDriver, который реализует общение с картой по SPI и передачу данных через DMA.
Реализация SD_MSC_GetCapacity() тривиальна — SdSpiCard умеет возвращать размер карты сразу в блоках
Чтение и запись также реализована вполне просто.
Карта у нас всегда готова (хотя в будущем я буду пристальнее смотреть на статус) и не защищена от записи.
LUN — Logic Unit Number. Теоретически наше запоминающее устройство может состоять из нескольких носителей (например жесткие диски в рейде). Все функции SCSI протокола указывают с каким носителем оно хочет работать. Функция GetMaxLun возвращает номер последнего устройства (количество устройств минус 1). Флешка у нас одна потому возвращаем 0.
Если честно, я особо не разобрался зачем оно нужно. Заглянув в спецификацию SCSI я увидел очень много полей смысла, которых я не понял. Из того, что я осилил – тут описывается стандартное устройство с прямым (не секвентальным) доступом, причем которое может быть извлечено (removable). Благо во всех примерах, которые я видел этот массив совпадает, так что пускай будет. Отлажено ведь.
Теперь все это нужно правильно проинициализировать
Подключаем, проверяем. Все работает, правда очень медленно — подключенный диск открывается секунд 50. Отчасти это из-за того, что линейная скорость чтения флешки через такой интерфейс получается около 200кб/с. Когда USB Mass Storage устройство подключается к компьютеру, операционная система вычитывает таблицу FAT. Я использую флешку на 8 гиг, а там FAT аж 7.5 мегабайт. Плюс чтение MBR, бут сектора, таблицы файлов — вот и получается почти 50 сек.
Также мне пришлось отключить DMA при работе с SD картой – там не все так просто с его включением. Дело в том, что моя реализация драйвера (как оказалось) не может работать из прерывания, а в USB все только через прерывания и работает. Не работает даже банальный HAL_Delay() т.к. он тоже завязан на прерывания, не говоря уже о синхронизации с использованием FreeRTOS. Это нужно будет переделать, но это отдельная история и к USB composite device она не относится. Как переделаю — обязательно напишу об этом статью и оставлю тут линку.
CDC + MSC Composite Device
А теперь со всей этой фигней мы попробуем взлететь (С) анекдот
Итак, мы уже знаем как строить USB устройства, которые могут реализовывать либо CDC либо MSC. Попробуем сделать композитное устройство, которое реализует оба интерфейса одновременно. Я посмотрел несколько других проектов, которые реализовывали композитное USB устройство и, как мне кажется, их подход имеет смысл. А именно: реализовать собственный драйвер класса, который будет реализовывать и ту и ту функциональность.
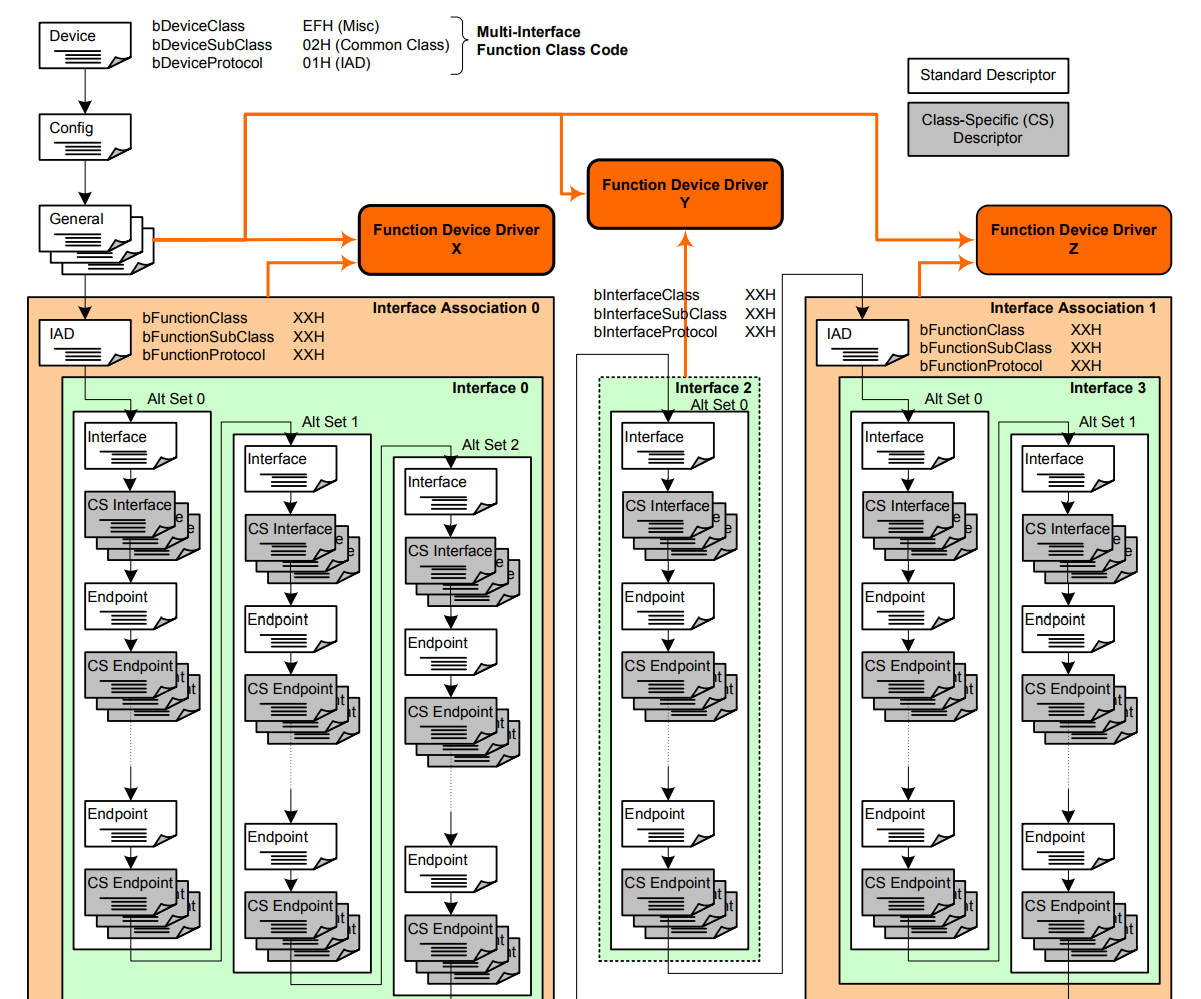
Красивая картинка, которая описывает пример описания композитного устройства. Взято из спецификации IAD
Для удобства использования объявим в коде номера конечных точек и интерфейсов.
Нумерация конечных точек повторяет нумерацию интерфейсов. Будем использовать №1 для MSC, №2 для управления CDC, №3 для передачи данных через CDC. Есть еще нулевая конечная точка для общего управления устройством, но она обрабатывается в недрах ядра USB и объявлять эти номера не обязательно.
Интерфейс USB библиотеки от ST оставляет желать лучшего. В некоторых случаях номера конечных точек используются с флагом направления передачи — установленный старший бит означает направление IN — в сторону хоста (я для этого завел константу IN_EP_DIR). При этом другие функции используют просто номер конечной точки. В отличии от оригинального дизайна я предпочел разделить эти все номера и использовать правильные константы в нужных местах. Там где используются константы с суффиксом EP_IDX флаг направления передачи не используется.
ВАЖНО! Хоть по спецификации USB номера конечных точек могут быть какими угодно, все же лучше расположить их последовательно и в том же порядке, в котором они объявляются в дескрипторах. Мне это знание далось неделей жесткого дебага, когда виндовый USB драйвер упорно ломился не в ту конечную точку и ничего не работало.
Начнем как обычно с дескрипторов. Большая часть дескрипторов будут жить в нашей реализации класса (usbd_msc_cdc.c), но дескриптор устройства и кое какие глобальные штуки определены в ядре USB в файле usbd_desc.c
В целом тут все тоже самое, отличаются только поля, которые определяют класс устройства (bDeviceClass). Теперь эти поля указывают, что это композитное устройство. Хосту нужно будет потрудится, разобраться во всех остальных дескрипторах и подгрузить правильные драйвера для каждого из компонентов. Поле bDeviceProtocol означает, что части композитного устройства будут описываться специальным дескриптором – дескриптором ассоциации интерфейсов (Interface Association Descriptor). О нем чуть ниже.
Дескриптор конфигурации примерно такой же как и раньше, разница только в количестве интерфейсов. Теперь у нас их 3
Далее идет объявление интерфейса и конечных точек для MSC. Не знаю почему именно в таком порядке (сначала MSC потом CDC). Так было в одном из примеров, которые я нашел, оттуда и скопировал. По идее порядок интерфейсов не имеет значения. Главное, чтобы они возили все свои дополнительные дескрипторы рядом. Ну и приколы с нумерацией конечных точек также имеют значение.
Дескрипторы MSC ничем не отличаются от тех, что были в предыдущем разделе.
А вот дальше идет новый тип дескриптора — IAD (Interface Association Descriptor) – дескриптор ассоциации интерфейсов. Ассоциация тут не в смысле организации, а в смысле какой интерфейс с какой функцией ассоциировать.
Этот хитрый дескриптор говорит хосту что описание предыдущей функции USB устройства (MSC) закончилось и сейчас будет совсем другая функция. Причем тут же указано какая именно — CDC. Также указано количество связанных с ней интерфейсов и индекс первого из них.
IAD дескриптор не нужен для MSC, т.к. там всего один интерфейс. Но IAD нужен для CDC чтобы сгруппировать 2 интерфейса в одну функцию. Об этом сказано в спецификации этого дескриптора
Наконец дескрипторы CDC. Они полностью соответствуют дескрипторам для одиночной CDC функции с точностью до номеров интерфейсов и конечных точек
Когда все дескрипторы готовы можно посчитать суммарный размер конфигурации.
Перейдем к написанию кода. Ядро USB общается с драйверами классов используя вот такой интерфейс
В зависимости от состояния или события на шине USB ядро вызывает соответствующую функцию.
Любую архитектурную проблему можно решить введением дополнительного абстрактного слоя… (С) еще один анекдот
Разумеется мы не будем реализовывать весь функционал целиком — за реализацию классов CDC и MSC будет отвечать существующий код. Мы лишь напишем прослойку, которая будет перенаправлять вызовы либо в одну, либо в другую реализацию.
Тут все просто: инициализируем (деинициализируем) оба класса. Вызываемые функции сами займутся созданием/удалением своих конечных точек.
Пожалуй самой сложной функцией будет Setup.
Это коллбек на один из стандартных запросов по шине USB, но этот запрос очень многогранный. Это может быть как получение данных (get), так и установка (Set). Это может быть запрос к устройству в целом, к одному из его интерфейсов или конечных точек. Также тут может приплыть как стандартный запрос, определенный базовой спецификацией USB, так и специфичный для определенного устройства или класса. Подробнее тут (Раздел “Пакет Setup”).
Из-за обилия разных случаев структура обработчика пакета Setup весьма сложна. Тут не получается написать один if или switch. В коде ядра USB обработка размазана по 3-4 большим функциям и в определенных случаях передается отдельному специализированному обработчику (коих там еще с десяток). Радует только то, что на уровень драйвера класса передается только незначительная часть запросов.
Я подсмотрел какие пакеты ходят через эту функцию и, похоже, можно ориентироваться по получателю. Если получатель пакета интерфейс — в поле wIndex будет номер интерфейса, если конечная точка, то в wIndex будет номер конечной точки. Исходя из этого перенаправляем запросы в соответствующий обработчик.
Кстати, чтобы это работало нужно не забыть поменять дефайн, определяющий количество интерфейсов, а то запрос просто не дойдет и срежется внутри ядра USB
Коллбеками DataIn и DataOut все проще. Там есть номер конечной точки — по ней и определим куда запрос перенаправлять
Обратите внимание, что флаг направления передачи в номере конечной точки не используется. Т.е. даже если некоторые функции используют MSC_IN_EP (0x81), то в этой функции нужно использовать MSC_EP_IDX (0x01).
Иногда данные приходят в нулевую конечную точку и для этого есть специальный коллбек. Я не знаю что бы я делал, если бы оба класса (и CDC и MSC) имели обработчики на этот случай – в таком запросе не указан интерфейс или номер конечной точки. Было бы невозможно понять кому адресован запрос. Благо такой запрос умеет обрабатывать только класс CDC – вот ему и отправим
Больше у нас не будет нетривиальных обработчиков. Есть еще парочка геттеров для дескрипторов, но их код стандартный и не представляет интереса. Заполним «таблицу виртуальных функций»
Теперь код инициализации
Инициализируем USB ядро, устанавливаем ему наш драйвер класса и настраиваем вторичные интерфейсы. Все? Нет не все. В таком виде оно не запустится.
Дело вот в чем. Каждый класс имеет некоторое количество приватных данных – состояние драйвера, какие то переменные, которые должны быть доступны в разных функциях драйвера. Причем это не могут быть просто глобальные переменные – они привязаны к конкретному USB устройству (иначе невозможно было бы оперировать сразу с несколькими устройствами, если такое необходимо). Поэтому в хендле USB завели сразу несколько полей для такого случая
Проблема в том, что каждый класс считает эти поля своей собственностью и цепляет туда свою структуру.
Решать это можно несколькими способами. Товарищи отсюда вообще затолкали в свою реализацию класса весь код из обоих драйверов (CDC и MSC) чтобы на ходу разбираться что к чему. Другой подход в том, что в эти поля класть структуры, в которых есть место для данных обоих классов. Тут частично использован этот подход, вдобавок еще часть данных перенесена в глобальные переменные (что ок, если у нас только один USB порт)
Мы, пожалуй, пойдем путем попроще. Если драйверы классов хотят эксклюзивных полей – дадим им эти поля
Во-первых, я дал каждому классу свои поля – пусть терзают их как хотят. Во-вторых, я назвал эти поля согласно тому что в них реально лежит – никакая там не UserData, а указатель на интерфейс.
Конечно же на плюсах это было бы красивее и элегантнее (при том же расходе памяти и проца). но и на C можно сделать по человечески. Раз уж я запустил свои ручонки в структуру хендла, то и поменял непонятные void * на человеческие типы (кстати, поле void * pData теперь оно по человечески называется pPCDHandle с соответствующим типом). И const тоже расставил где надо. Пришлось, правда, повозиться с forward declarations.
Про организацию проекта. В некоторых IDE проект может быть построен следующим образом. Библиотека USB и исходники драйверов классов поставляются вместе с STM32 Cube, но часть файлов предлагается написать пользователю. Может так случится, что библиотека лежит где нибудь в общей локации и используется несколькими проектами. Стоит понимать, что я сейчас мы меняем код библиотеки USB и потому лучше иметь собственную копию, чтобы никому не мешать.
Конечно же переименования полей должны отразится в коде драйвера. Но тут как раз все просто – контекстная замена решает проблему.
Тут главное не переборщить. Я вот менял руками, просматривая каждое использование. Там я нашел «баг» в коде, зачинил его а потом 3 дня дебажился в попытке понять почему оно не работает.
Вот тут было все правильно – проверяем pClassData, а обращаемся к pClass. Если «починить» (проверять pClass), то работать не будет. Т.е. pClassData является своеобразным маркером того, что класс проинициализирован.
Возвращаясь к нашему драйверу. Поскольку Init() инициализирует обе переменные pClassDataXXX, то в этом коде можно проверять любую.
Финальный штрих – распределение PMA буферов
Для наших конечных точек потребуется 7 буферов — 2 на нулевую конечную точку (точку управления), 2 на MSC и 3 на CDC. Но самое интересное тут — начальные адреса (последний параметр). По непонятной причине этот нюанс тщательно обходится всеми туториалами. В даташите написано про распределение буферов в PMA и как это выглядит на на уровне регистров, но вот как пользоваться соответствующими функциями из HAL информации нет. Восполним этот пробел.
Итак. У контроллера есть специальная память — PMA (Packet Memory Area). Это такая память куда программа может записать данные, а USB периферия их прочитать (и наоборот). Память эта заранее не распределена, т.к. разные конечные точки могут быть настроены на разный размер пакета. Поэтому существует таблица BTABLE в которой указано где какой буфер размещается. Причем сама эта таблица также размещается в PMA. Таблицу можно двигать и размещать в любом месте PMA, но HAL умеет ее размещать только в самом начале.
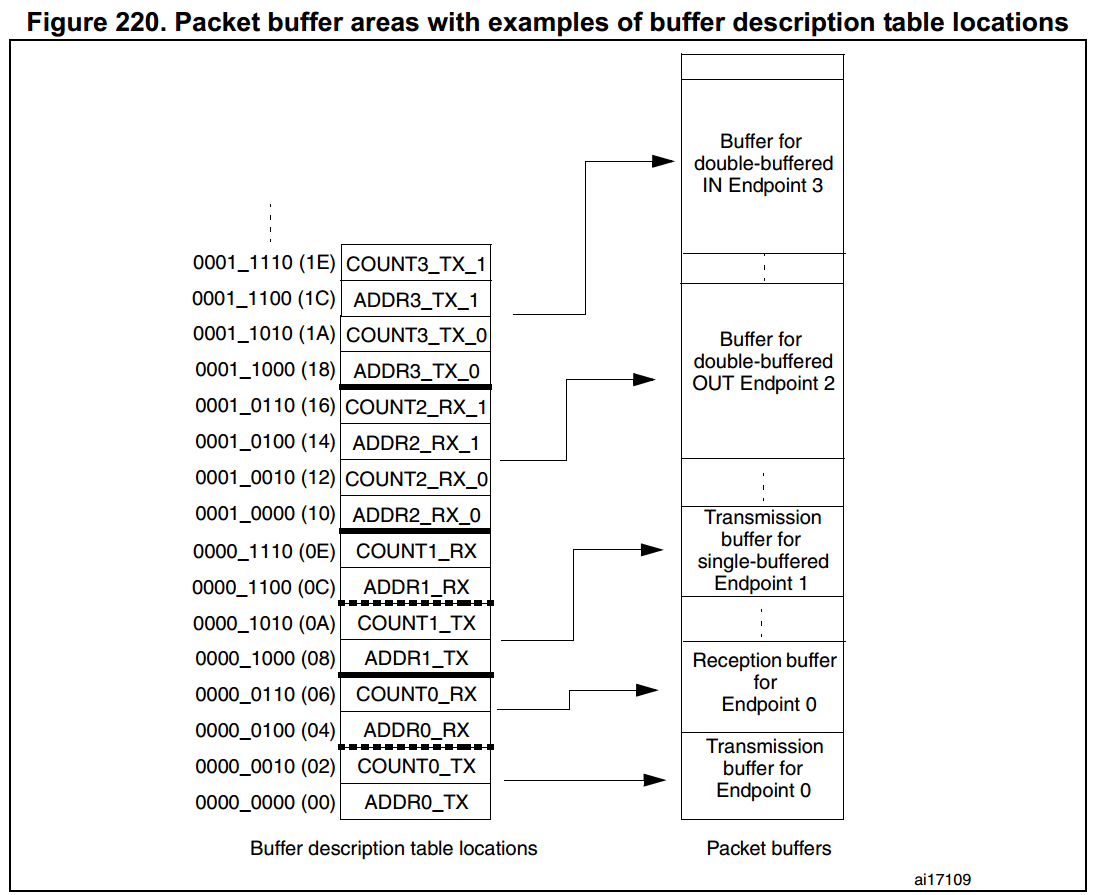
Картинка из Reference Manual микроконтроллеров серии STM32F103
Итак, как же высчитать смещения буферов? Размер таблицы напрямую зависит от количества используемых конечных точек. Каждая конечная точка в таблице представлена записью из 4 16-битных значений (по 2 на прием и 2 на передачу, даже если одно из направлений не используется). У нас используется 4 конечных точки — нулевая, MSC и две для CDC (не путайте с количеством буферов — у нас их 7 — по два на конечную точку, но одна точка однонаправленная, поэтому у нее только один буфер). Значит размер таблицы будет 4 точки * 4 записи * 2 байта = 32 байта.
Как я уже сказал HAL умеет располагать только вначале PMA области. Значит первый буфер мы можем расположить только по смещению 0x20 (32 байта — размер таблицы). Буферы для конечных точек можно размещать где угодно в PMA памяти, лишь бы они не налазили друг на друга. Каждая конечная точка определяет максимальный размер пакета, который она готова обрабатывать, буфер должен быть равен или больше этого размера.
Я расположил буфера с шагом 64 байта (максимальный рекомендуемый размер буфера для устройств USB Full Speed), но для некоторых конечных точек можно было бы и меньше. Так по управляющей CDC конечной точке много данных не бегает (CDC_CMD_PACKET_SIZE равно 8 байт), поэтому и буфер можно делать всего на 8 байт. Впрочем, мне было не жалко и 32 байт — просто чтобы круглые цифры получались.
Пора компилировать и запускать. Моя винда сразу определила само устройство, увидела также и 2 составляющие. Это хорошая новость. Но есть и плохая. Если Mass Storage устройство определилось сразу, то CDC — нет.
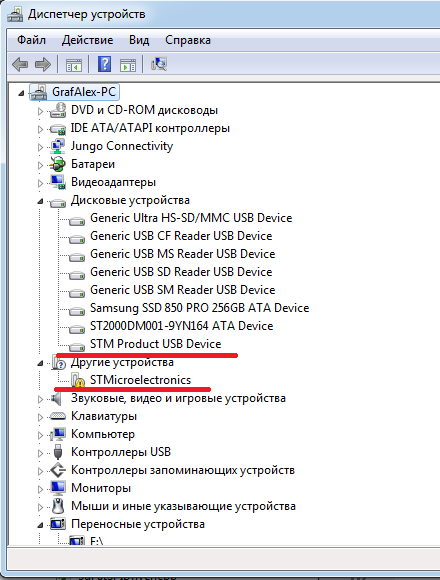
Не беда — нужно просто подсунуть винде правильный драйвер. Вообще-то устройство стандартное и специальный драйвер не нужен. Достаточно просто связать это устройство со стандартным драйвером (в нашем случае это будет usbser.sys)
На самом деле я в этой кухне не очень разбираюсь. По идее нужно скачать STMicroelectronics Virtual COM Port драйвер с сайта ST. Драйвер устанавливается в C:\Program Files (x86)\STMicroelectronics\Software\Virtual comport driver, а внутри есть файлик stmcdc.inf — вот он то нам и нужен. В этом файле в двух секциях есть строка вида
Вот она то и связывает наш VID/PID c драйвером устройства. Только этого мало — нужно еще указать номер интерфейса, который управляет CDC. В моем случае это первый интерфейс (нулевой отвечает за MSC). Для этого строка должна выглядеть так
На самом деле оригинальную строку можно не менять, а просто
добавлять строки в соответствующие секции.
После всех приготовлений находим нерабочее устройство в списке устройств, просим обновить драйвер, указываем директорию где лежит inf файл и вуаля — драйвер установлен. Винда сама присвоит этому устройство имя COMxx — можно брать любимую терминалку и открывать этот COM порт.
С линуксом все проще — там все заводится без танцев с бубном драйверами.
Заключение
На некоторых форумах видел сообщения вроде “как все в этом USB сложно, какие-то драйверы… Я щас лучше на регистрах нафигачу”. Ребят, не все так просто. Уровень регистров это, наверное, самая простая часть. Но помимо нее есть огромный пласт логики, которую должно реализовывать устройство. И вот тут уже без знаний протоколов и многих сотен страниц спецификаций никак.
Но не все так плохо. Люди уже позаботились и написали всю логику. В большинстве случаев остается только подставить нужные значения и подправить некоторые параметры. Да, библиотека от ST — тот еще монстр. Но после вдумчивого прочтения USB In A Nutshell, парочки спецификаций конкретного класса устройств и работы со сниффером многие вещи становятся на свои места. Библиотека начинает выглядеть более-менее стройно. Можно даже сравнительно небольшими усилиями сделать кастомный драйвер класса, что мы с успехом и сделали.
Я делал реализацию композитного CDC+MSC устройства, но примерно такой же подход можно применить и для других комбинаций — CDC+HID, MSC+Audio, CDC+MSC+HID и других. Моя реализация предназначена для работы на микроконтроллерах серии STM32F103, но сам принцип может быть адаптирован и для других микроконтроллеров (в т.ч. и не STM32).
В этой статье я не ставил себе задачу рассказать как работает USB во всех деталях — во-первых есть статьи и книги, которые рассказывают это лучше (я затронул лишь малую часть), а во-вторых очень много вещей лучше черпать из первоисточников (спецификаций).
Вместо пересказа спецификаций я попробовал описать как работает реализация USB стека от ST. Также я постарался обратить внимание на особые моменты и рассказать почему делается именно так.
Я долго сомневался ставить ли галочку “Tutorial”. С одной стороны я даю рекомендации и пошаговые инструкции, обращаю внимание на особые моменты и даю ссылки на первоисточники. С другой стороны я не могу предоставить готовую библиотеку для скачивания и встраивания в свои проекты.
Дело в том, что в процессе работы над своим проектом я хорошенько поработал напильником, лобзиком и другими инструментами над этой библиотекой. Я выкинул много кода, который в моем устройстве не нужен, часть поменял, починил некоторые вещи, которые мне не нравились. Теперь библиотека USB весьма серьезно отличается от той, что выложена на сайте ST. Некоторые из изменений специфичны для моего проекта и могут не подойти для других ситуаций. Впрочем, добро пожаловать в мой репозиторий — изучайте, копируйте к себе, задавайте вопросы, предлагайте улучшения.
Напоследок хочу высказать благодарность всем тем, кто мне так или иначе помогал с моей реализацией. Спасибо, ребята!