Uart порт что это
UART и USART: введение
Интерфейсы UART/USART, несмотря на их солидный возраст, до сих пор находят широкое применение, очень распространены и весьма востребованы. Имеют аппаратную реализацию во многих микроконтроллерах. Например, микроконтроллеры STM32 из семейства STM32F100xx, в зависимости от варианта исполнения, содержат 2 или 3 USART. Синхронная передача используется гораздо реже асинхронной и обычно USART используется в режиме UART.
UART может применяться как для осуществления взаимодействия компонентов внутри одного устройства, так и для подключения устройств между собой. Для внешних подключений сигналы с уровнями логики ТТЛ или КМОП подходят мало из-за низкой помехоустойчивости. Распространённым стандартом физического уровня для UART, который подходит для подключения внешних устройств является RS-232. Этому стандарту, в частности, соответствует последовательный порт (COM-порт) компьютера. Так что, микроконтроллер с помощью схемы преобразования уровней может обмениваться информацией с COM-портом компьютера, но об этом чуть позже.
Варианты подключения UART
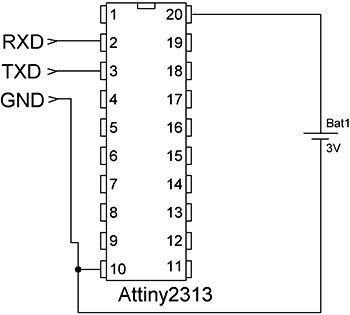
В UART передача данных происходит в последовательной форме, т.е. по одному биту. Поэтому для передачи в одном направлении требуется один проводник; для полнодуплексной двунаправленной связи потребуется два проводника.
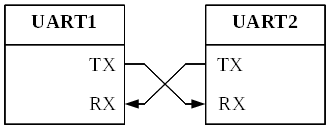
Рис. %img:uc1
К однопроводной линии можно подключить несколько устройств, которые будут образовывать сеть для передачи данных. Арбитраж в этой сети должен быть реализован программно.
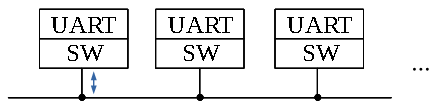
Рис. %img:un
Формат передачи данных UART
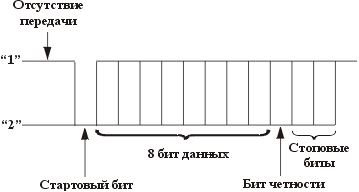
В отсутствии передачи на выходе UART присутствует уровень лог. 1.
Данные передаются в виде посылок (фреймов), каждая из которых состоит из стартового бита, битов данных и одного или нескольких стоп-битов. Длительность всех битов одинакова, связана со скоростью передачи соотношением T=1/S. Существует ряд стандартных скоростей передачи: 110, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200, 230400, 460800, 921600 бод. Если внутри одного устройства связь можно осуществлять на произвольной скорости, то для связи с внешними устройствами следует придерживаться стандартных величин.
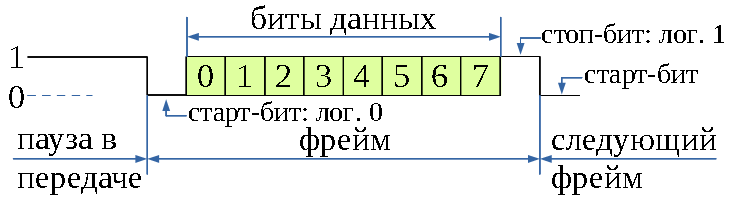
Рис. %img:uf
Так как во время передачи стоп-бита и пока линя свободна, на выходе присутствует единичное значение, а старт-бит имеет значение лог. 0, старт-бит позволяет выявить момент начала передачи данных, разделить две последовательные посылки и осуществить синхронизацию передатчика и приёмника.
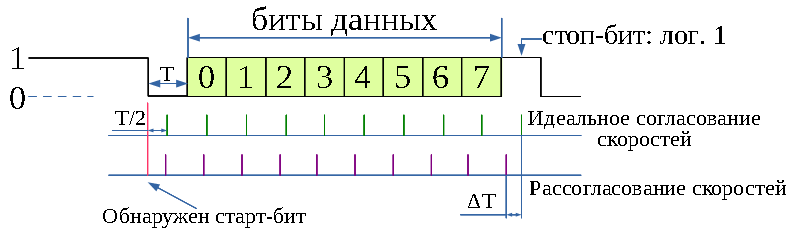
Рис. %img:ug
Управление потоком данных
Для управления потоком данных UART используется программный или аппаратный метод. В случае программного метода, информация о готовности устройства принимать данные или о необходимости остановить передачу передаётся по тем же каналам, что и данные. Принимающая сторона программно разделяет данные и управляющие сигналы в соответствии с принятым протоколом.
Интерфейс UART предусматривает возможность использования дополнительных сигналов (CTS, RTS) для аппаратного управления потоком данных. Аппаратное управление может использоваться некоторыми медленными устройствами или устройствами с простой схемной реализацией. Однако оно потребует двух дополнительных линий для подключения устройства.
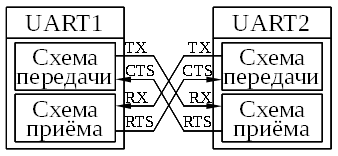
Рис. %img:ufc
Приёмник, в свою очередь, устанавливает на выходе RTS значение лог. 0, если он готов принимать данные и устанавливает лог. 1, требуя от передатчика остановить передачу.
COM-порт (интерфейс стандарта RS-232)
Хотя он и считается устаревшим для использования в компьютерах, тем не менее, интерфейс стандарта RS-232 ещё не утратил полностью своего значения и существует оборудование, где он используется. Интерфейс не обеспечивает высокой скорости передачи данных (максимум 115200 бод), но зато прост и дёшев в реализации, надёжен.
Для сигналов используются следующие уровни.
Требуется, чтобы любой вывод интерфейса выдерживал замыкание на любой другой вывод и на источник напряжения 5 В.
В таблице указаны обозначения для сигналов принятые для COM-порта, обозначения в соответствии с RS-232, номера выводов в разъёмах и краткое описание назначения сигналов.
Для подключения к интерфейсу используются 25-контактные или 9-контактные разъёмы (DB25, DB9). Первоначально применялись 25-контактные разъёмы, но многие сигналы не использовались устройствами. В связи с этим произошёл переход к 9-контактным разъёмам. В оконечном оборудовании используются разъёмы типа вилка (Pin): DB-9P. В аппаратуре передачи данных (модемы, например) используются разъёмы типа розетка (Socket): DB-9S.
Гальваническая развязка для COM-порта
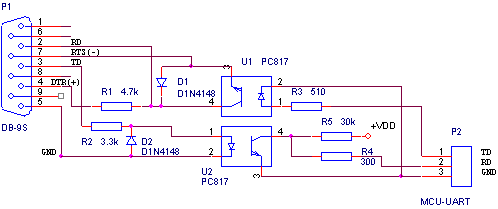
Рис. %img:rss
Для преобразования сигналов между уровнями ТТЛ/КМОП логики и уровнями RS-232 существуют специализированные микросхемы.
Работает предложенная схема гальванической развязки для COM-порта следующим образом. Когда на TD выходе UART установлен уровень лог. 0 (обычные КМОП-уровни для микроконтроллеров), ток через светодиод оптрона U1 отсутствует, транзистор оптрона заперт, за счёт резистора R1 от выхода DTR(+) COM-порта на входе RD устанавливается положительный относительно общего провода потенциал, что соответствует уровню лог. 0 для RS-232. Если на выходе TD устройства UART установлена лог. 1, транзистор оптрона U1 открывается и RD вход COM-порта подключается к выходу RTS (-), за счёт чего на входе RD формируется отрицательный потенциал (лог. 1 для RS-232).
Оптрон U2 отвечает за передачу данных в обратном направлении. Когда на TD выходе COM-порта установлен уровень лог. 0 (положительный потенциал), транзистор оптрона U2 открывается, формируя лог. 0 на входе UART. Если на выходе TD COM-порта устанавливается лог. 1 (отрицательный потенциал), транзистор оптрона U2 закрывается и за счёт подтягивающего к высокому уровню резистора на входе RD устройства UART формируется логическая 1.
Если разъём P1 отключён от COM-порта, или компьютер выключен, то это будет восприниматься как «линия свободна» (отсутствие передачи данных), на вход USART микроконтроллера при этом будет подаваться лог. 1. Допускается подключение разъёма P1 к COM-порту работающего компьютера, это не приведёт к повреждению оборудования, но в некоторых случаях, в момент подключения, компьютер может получить какое-то количество случайных байтов.
Для однонаправленной связи можно оставить только соответствующую часть схемы. Если используется только передача данных от COM-порта к UART микроконтроллера, то отпадает необходимость в описанном выше программном конфигурировании COM-порта.
USART в STM32 (STM32F100xx)
Функциональная схема USART в микроконтроллерах STM32.
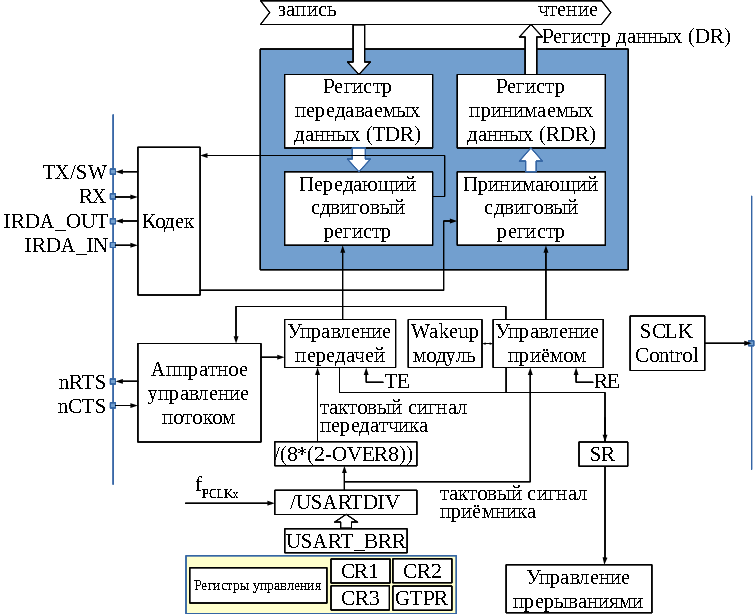
Рис. %img:ust
В обычном двунаправленном полнодуплексном режиме требуется как минимум два вывода для подключения USART: RX (Receive Data In) и TX (Transmit Data Out).
RX: вход для последовательных данных. Для извлечения данных используется техника оверсэмплинга (супердискретизации), когда чтение входа осуществляется с частотой, в несколько раз превышающей скорость передачи данных (в данном случае в 8 или 16 раз). Сопоставление считанной последовательности с предопределёнными шаблонами позволяет выделить фронт сигнала, определить значение принимаемого бита и обнаружить шум при его наличии в принимаемом сигнале.
TX: выход для передачи данных в последовательной форме. Когда передатчик отключён, вывод возвращается в состояние, заданное конфигурацией порта ввода-вывода. Когда передатчик включён, но никаких данных не передаётся, на выходе TX устанавливается высокий уровень (паузе в передаче данных, или свободной линии соответствует наличие лог. 1 в линии). В однопроводном режиме или режиме смарт-карты этот вывод используется как для передачи, так и для приёма данных (поэтому на схеме он обозначен как TX/SW).
SCLK: выход для тактового сигнала при синхронной передаче данных, соответствует мастер-режиму SPI. Тактовые импульсы не формируются во время старт и стоп-битов. Наличие импульса во время передачи последнего бита данных определяется программно. Параллельно может происходить синхронный приём данных на входе RX. Фаза и полярность импульсов задаются программно. В режиме смарт-карты вывод SCLK может формировать тактовый сигнал для смарт-карты.
Программно приём и передача данных через интерфейс USART осуществляется путём чтения и записи регистра данных DR. Записываемые в регистр данные помещаются в регистр передаваемых данных TDR, а затем, когда завершится текущая передача, копируются в передающий сдвигающий * регистр. Если в данный момент ничего не передаётся, данные сразу помещаются в сдвигающий регистр. Сдвигающий регистр преобразует данные из параллельной формы представления в последовательную: схема управления с заданной тактовой частотой сдвигает содержимое регистра на 1 бит вправо. Сдвигаемые биты, начиная с младшего, подаются на выход USART. Кроме того, схема управления формирует стартовый бит, бит чётности (если используется) и стоп-биты.
* Сдвигающий регистр также называют регистром сдвига или сдвиговым регистром.
После того, как содержимое TDR копируется в сдвигающий регистр, в DR можно записывать очередной байт, без риска повредить предыдущее содержимое.
Принимаемые данные попадают в приёмный сдвигающий регистр. Когда приём фрейма завершается, данные из приёмного сдвигающего регистра помещаются в регистр принимаемых данных (RDR), откуда они могут быть прочитаны путём чтения регистра данных DR. Такое устройство регистра данных позволяет одновременно передавать и получать данные.
Далее смотрите подробное описание всех регистров устройства USART в микроконтроллерах STM32: «Регистры USART в микроконтроллерах STM32F100xx». 
А также несколько примеров использования USART для передачи данных: «UART и USART. COM-порт. Часть 2».
Интерфейсы микроконтроллеров (Часть 1)
Итак что же такое интерфейс?
Вездесущая Википедия дает такой ответ: Физический (аппаратный) интерфейс — способ взаимодействия физических устройств. Чаще всего речь идёт о компьютерных портах.
Т.е. если мы попытаемся связать наш микроконтроллер с другими устройствами нам потребуется знать определенный набор правил, методов и характеристик оборудования, чтобы сделать это безболезненно. Давайте рассмотрим основные типы интерфейсов, которые мы можем встретить «на борту» микроконтроллера.
Последовательный интерфейс UART/USART
Подключать UART надо, так сказать «наоборот» RXD к TXD, а TXD к RXD как на картинке ниже:
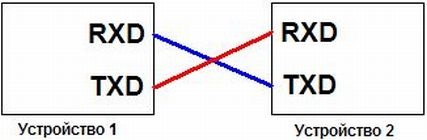
Все сигналы UART передаются специально выбранными уровнями, обеспечивающими высокую помехоустойчивость связи. Отметим, что данные передаются в инверсном коде (логической единице соответствует низкий уровень, логическому нулю — высокий уровень. Более подробно о логических уровнях смотрите тут — www.drive2.ru/b/2528993/).
Формат передаваемых данных показан на рисунке 4. Собственно данные (5, 6, 7 или 8 бит) сопровождаются стартовым битом, битом четности и одним или двумя стоповыми битами. Получив стартовый бит, приемник выбирает из линии биты данных через определенные интервалы времени. Очень важно, чтобы тактовые частоты приемника и передатчика были одинаковыми, допустимое расхождение — не более 10%). Скорость передачи по RS-232C может выбираться из ряда: 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с.
Последовательный периферийный интерфейс SPI
Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR.
Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.
Изначально он был придуман компанией Motorola, а в настоящее время используется в продукции многих производителей. Его наименование является аббревиатурой от ‘Serial Peripheral Bus’, что отражает его предназначение — шина для подключения внешних устройств. Шина SPI организована по принципу ‘ведущий-подчиненный’. В качестве ведущего шины обычно выступает микроконтроллер, но им также может быть программируемая логика, DSP-контроллер или специализированная ИС. Подключенные к ведущему шины внешние устройства образуют подчиненных шины. В их роли выступают различного рода микросхемы, в т.ч. запоминающие устройства (EEPROM, Flash-память, SRAM), часы реального времени (RTC), АЦП/ЦАП, цифровые потенциометры, специализированные контроллеры и др.
Главным составным блоком интерфейса SPI является обычный сдвиговый регистр, сигналы синхронизации и ввода/вывода битового потока которого и образуют интерфейсные сигналы. Таким образом, протокол SPI правильнее назвать не протоколом передачи данных, а протоколом обмена данными между двумя сдвиговыми регистрами, каждый из которых одновременно выполняет и функцию приемника, и функцию передатчика. Непременным условием передачи данных по шине SPI является генерация сигнала синхронизации шины. Этот сигнал имеет право генерировать только ведущий шины и от этого сигнала полностью зависит работа подчиненного шины.
Электрическое подключение
Существует три типа подключения к шине SPI, в каждом из которых участвуют четыре сигнала.
Самое простое подключение, в котором участвуют только две микросхемы, показано на рисунке 6. Здесь, ведущий шины передает данные по линии MOSI синхронно со сгенерированным им же сигналом SCLK, а подчиненный захватывает переданные биты данных по определенным фронтам принятого сигнала синхронизации. Одновременно с этим подчиненный отправляет свою посылку данных. Представленную схему можно упростить исключением линии MISO, если используемая подчиненная ИС не предусматривает ответную передачу данных или в ней нет потребности. Одностороннюю передачу данных можно встретить у таких микросхем как ЦАП, цифровые потенциометры, программируемые усилители и драйверы. Таким образом, рассматриваемый вариант подключения подчиненной ИС требует 3 или 4 линии связи. Чтобы подчиненная ИС принимала и передавала данные, помимо наличия сигнала синхронизации, необходимо также, чтобы линия SS была переведена в низкое состояние. В противном случае, подчиненная ИС будет неактивна. Когда используется только одна внешняя ИС, может возникнуть соблазн исключения и линии SS за счет жесткой установки низкого уровня на входе выбора подчиненной микросхемы. Такое решение крайне нежелательно и может привести к сбоям или вообще невозможности передачи данных, т.к. вход выбора микросхемы служит для перевода ИС в её исходное состояние и иногда инициирует вывод первого бита данных.

При необходимости подключения к шине SPI нескольких микросхем используется либо независимое (параллельное) подключение (рис. 7), либо каскадное (последовательное) (рис. 8).
UART ПРОТОКОЛ: ОПИСАНИЕ РАБОТЫ
UART (Universal Asynchronous Transmitter Receiver) это наиболее распространенный протокол, используемый для полнодуплексной последовательной связи. Устройство отправляет и получает данные из одной системы в другую. В этом мануале мы подробно изучим основы связи и работу протокола UART, подробное описание интерфейса и распиновку разъёмов..

Что такое UART
UART означает универсальный асинхронный приемник-передатчик. Это периферийное оборудование, которое находится внутри микроконтроллера. Функция UART заключается в преобразовании входящих и исходящих данных в последовательный двоичный поток. Восьмибитные последовательные данные, полученные от периферийного устройства, преобразуются в параллельную форму с использованием последовательного преобразования в параллельное, а параллельные данные, полученные от ЦП, преобразуются с помощью преобразования из последовательного в параллельный. Эти данные представлены в модулирующей форме и передаются с определенной скоростью передачи.
Почему используют UART
Для быстрой связи используются такие протоколы, как SPI (последовательный периферийный интерфейс) и USB (универсальная последовательная шина). Но когда высокоскоростная передача данных не требуется, применяют протокол UART. Это дешевое устройство связи с одним передатчиком и приемником. Тут требуется лишь один провод для передачи данных и один для приема. О конвертере USB-ART прочитайте по ссылке.

Его можно подключить к персональному компьютеру с помощью преобразователя RS232-TTL или USB-TTL. Сходство между RS232 и UART заключается в том, что им обоим не нужен таймер для передачи и приема данных. Кадр UART состоит из 1 стартового бита, 1 или 2 стоповых битов и бита четности для последовательной передачи данных.
Блок-схема UART
UART состоит из следующих основных компонентов: передатчик и приемник. Передатчик состоит из регистра удержания передачи, регистра сдвига передачи и логики управления. Точно так же приемник состоит из регистра удержания приема, регистра сдвига приемника и логики управления. Обычно и передатчик, и приемник снабжены генератором скорости передачи данных.

Генератор скорости передачи данных формирует скорость, с которой передатчик и приемник должны отправлять и получать данные. Регистр удержания передачи содержит передаваемый байт данных. Регистр сдвига передачи и регистр сдвига приемника сдвигают биты влево или вправо, пока байт данных не будет отправлен или получен.
В дополнение к этому, предусмотрена логика управления чтением или записью, указывающая когда читать и записывать. Генератор скорости передачи данных формирует скорости в диапазоне от 110 бит / с до 230400. В большинстве случаев микроконтроллеры предлагают более высокие скорости передачи, такие как 115200 и 57600 бит / с, но такие устройства как GPS и GSM, используют более низкую скорость в 4800 и 9600 бод.
Как работает UART
Передатчик и приемник используют стартовый бит, стоповый бит и параметры синхронизации для взаимодействия друг с другом. Исходные данные находятся в параллельной форме. Например есть 4-х битные данные, и чтобы преобразовать их в последовательную форму нужен преобразователь из параллельного в последовательный. Обычно для проектирования преобразователей используются D-триггеры.

D-триггер, также известный как триггер данных, сдвигает один бит со стороны входа на сторону выхода только тогда, когда таймер изменяет переход из высокого состояния в низкое или из низкого состояния в высокое. Точно так же, если надо передать 4 бита данных, понадобится 4 триггера.
Теперь спроектируем преобразователь из параллельного в последовательный и из последовательного в параллельный.
Параллельное преобразование в последовательное


Последовательное преобразование в параллельное

Шаг 1: Возьмем 4 триггера. Количество триггеров совпадает с количеством передаваемых битов.
Шаг 2: Сначала отключим параллельную шину. Не включаем пока не будут загружены все биты. Сохраним данные на входе первого триггера. Теперь установим высокий уровень тактовой частоты, это сдвинет младший бит на вход второго триггера и выход первого. Точно так же сдвинем все биты один за другим, сделав тактовый импульс высоким. Преобразователь находится в состоянии удержания до тех пор, пока все биты не будут переданы на выход.
Шаг 3: Теперь каждый триггер содержит один бит последовательных данных. Пока все биты передаются на выход триггера, активируем шину. Это заставит конвертер отправлять все биты за раз.

Формат протокола UART
Начинается связь со стартовым битом «0». Стартовый бит инициирует передачу последовательных данных, а стоповый бит завершает транзакцию данных.

Он также имеет бит четности (четный или нечетный). Бит четности представлен как «0» (четное количество единиц), а бит нечетной четности представлен как «1» (нечетное количество).
Передача данных

Передатчик отправляет по одному биту за раз. После отправки одного бита отправляется следующий. Таким образом, все биты данных отправляются на приемник с заранее определенной скоростью передачи. При передаче каждого бита будет определенная задержка. Например, чтобы отправить один байт данных со скоростью 9600 бод, каждый бит отправляется с задержкой 108 мкс. Данные добавляются с битом четности. Таким образом для отправки 7 бит требуется 10 бит данных.
Прием данных
Для приема данных используется приёмная линия RxD.

Пример интерфейса UART
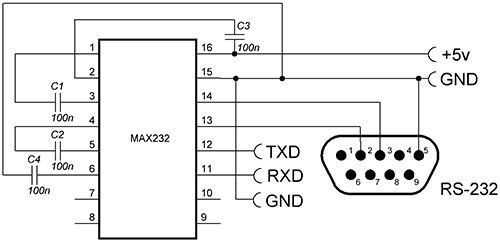
Этот пример демонстрирует взаимодействие ESP8266 UART с MAX232. Микросхема MAX232 питается от источника 5 В, и включает в себя генератор емкостного напряжения для управления напряжением 232 уровня. Она поставляется с двумя передатчиками, также называемыми драйвером (Tin, Tout) и приемниками (Rin и Rout).

Здесь использовался ESP8266 (32-битный микроконтроллер) со встроенным UART. Связь может осуществляться с ESP8266 с использованием AT-команд через преобразователь уровня RS232 в TTL (MAX232). На схеме показано подключение ESP8266 к компьютеру.

Запрашивая действительные AT-команды через ПК, микросхема Wi-Fi ответит подтверждением. Вот шаги для реализации последовательной связи с ПК.
Команды ESP8266

Далее показан ответ модуля ESP8266.

UART и USART
| UART | USART |
|---|---|
| Тайминги генерируются внутри микроконтроллера. | Отправляющее устройство сгенерирует тайминг. |
| Скорость передачи данных низкая. | Скорость передачи данных выше из-за внешних таймингов. |
| Автономный протокол | Поддерживает несколько протоколов, таких как LIN, RS-485, IrDA, смарт-карта и т. д. |
| Перед передачей необходимо знать скорость передачи. | Нет необходимости знать скорость передачи заранее. |
| Подходит для низкоскоростной связи | Подходит для высокоскоростной связи. |
| Сниженный энергетический след. | Обеспечивает последовательную связь при высоком энергопотреблении |
Основное различие между UART и USART заключается в том, что UART поддерживает только асинхронную связь, тогда как USART поддерживает как синхронную, так и асинхронную. Вот сравнение между USART и UART:
RS232 и UART
Логические уровни представляют собой уровни рабочего напряжения, которые устройство может выдержать для работы в безопасной зоне. Вот уровни напряжения для RS232 и TTL:


Логика TTL / CMOS
UART работает по TTL логике.

Преимущества и недостатки UART

Области применения протокола
Последовательный порт отладки использует драйвер UART для печати данных, поступающих извне. Можем использовать этот протокол для отправки и получения команд на встроенные устройства и от них. Также выполняется связь в GPS, модеме GSM / GPRS, чипах Wi-Fi и других модулях работающих с UART. Используется в доступе к мэйнфрейму для подключения разных компьютеров.
Форум по обсуждению материала UART ПРОТОКОЛ: ОПИСАНИЕ РАБОТЫ
 Сравнение активных и пассивных радиодеталей, основы классификации.
Сравнение активных и пассивных радиодеталей, основы классификации.
 Схема и сборка самодельного усилителя НЧ на TDA7379, TDA7375, TDA7377 или STA540.
Схема и сборка самодельного усилителя НЧ на TDA7379, TDA7375, TDA7377 или STA540.
 Микроконтроллер ATtiny13 и MOSFet транзисторы будут управлять светодиодными лентами в этой схеме ЦМУ.
Микроконтроллер ATtiny13 и MOSFet транзисторы будут управлять светодиодными лентами в этой схеме ЦМУ.