Ещё одна статья про кватернионы и углы Эйлера
По работе у меня возникла необходимость переводить координаты объекта из углов Эйлера в кватернионы и обратно.
В ходе разбирательства пришлось прочитать несколько статей на Хабре, посвященных кватернионам и углам Эйлера, Википедию и просто методички и статьи разных ВУЗов. Для удобства приведу ссылки на статьи, с Хабра:
Формулы для пересчёта углов Эйлера в кватеринионы и обратно найти можно, но
Опишу коротко суть проблемы:
Собственно, об этом уже было сказано много раз. Зачем же писать новую статью? Дело в том, что информации о том, как переводить из углов Эйлера в кватернион и обратно — не так уж и много. И в большинстве случаев описывается только 1 или 2, 3, 6 систем углов Эйлера. Но не все 24. И по аналогии вывести остальные (и не ошибиться) не очень-то и просто. Во время «откапывания истины» мне удалось найти несколько онлайн-конвертеров из углов в кватернионы и по тому, в каком направлении увеличивается их возможность по конвертации можно понять, сколько ещё вариантов осталось не охвачено:
quat.zachbennett.com — один тип углов
energid.com — один тип углов
onlineconversion.com — один тип углов
quaternions.online — три типа углов
andre-gaschler.com — шесть типов углов
Не буду приводить в тексте статьи свои исходники (они написаны на языке Octave). Дам лишь ссылку на репозитарий и прокомментирую его содержимое:
Обеих функций в Octave нет. В Matlab поддерживаются только 6 типов углов Эйлера на неподвижных осях. В моих реализациях поддерживаются все 24 типа. При этом типы с буквой r на конце (например, XYZr) означают, что оси вращаются вместе с объектом. Типы с буквой s на конце (например, XYZs) означают, что оси остаются неподвижными.

Они также могут представлять ориентацию мобильной системы отсчета в физике или ориентацию общего базиса в трехмерной линейной алгебре. Позже Питер Гатри Тейт и Джордж Брайан представили альтернативные формы, предназначенные для использования в аэронавтике и технике.
СОДЕРЖАНИЕ
Эквивалентность цепных вращений

Углы Эйлера могут быть определены элементарной геометрией или композицией поворотов. Геометрическое определение демонстрирует, что трех составных элементарных вращений (вращений вокруг осей системы координат ) всегда достаточно для достижения любого целевого кадра.
Без учета возможности использования двух различных соглашений для определения осей вращения (внутренней или внешней) существует двенадцать возможных последовательностей осей вращения, разделенных на две группы:
Правильные углы Эйлера


Геометрическое определение
Соглашения по внутреннему вращению
Углы Эйлера можно определить внутренними поворотами. Повернутая рамка XYZ может быть представлена первоначально выровненной по оси xyz перед тем, как претерпеть три элементарных поворота, представленных углами Эйлера. Его последовательные ориентации можно обозначить следующим образом:
Соглашения по внешнему вращению
Знаки, диапазоны и условные обозначения
О диапазонах (с использованием обозначения интервалов ):
Есть шесть возможностей выбора осей вращения для собственных углов Эйлера. Во всех них первая и третья оси вращения совпадают. Шесть возможных последовательностей:
Прецессия, нутация и собственное вращение

Статическое определение подразумевает, что:
Хотя все три движения могут быть представлены оператором вращения с постоянными коэффициентами в некоторой системе отсчета, они не могут быть представлены этими операторами одновременно. При заданной системе отсчета максимум одна из них будет без коэффициентов. Только прецессия может быть выражена в целом в виде матрицы в основе пространства без зависимостей других углов.
Эти движения также ведут себя как карданный подвес. Если мы предположим набор кадров, каждый из которых может перемещаться относительно первого только на один угол, как у подвеса, будет существовать внешний фиксированный кадр, один последний кадр и два кадра посередине, которые называются промежуточными. кадры ». Два в середине работают как два карданных кольца, которые позволяют последней рамке достигать любой ориентации в пространстве.
Углы Тейта – Брайана

Определения

Это подразумевает другое определение линии узлов геометрической конструкции. В случае собственных углов Эйлера он был определен как пересечение двух гомологичных декартовых плоскостей (параллельных, когда углы Эйлера равны нулю; например, xy и XY ). В случае углов Тейта – Брайана он определяется как пересечение двух негомологических плоскостей (перпендикулярных, когда углы Эйлера равны нулю; например, xy и YZ ).
Условные обозначения

Три элементарных поворота могут происходить либо вокруг осей исходной системы координат, которая остается неподвижной ( внешние вращения ), либо вокруг осей вращающейся системы координат, которая меняет свою ориентацию после каждого элементарного вращения ( внутренние вращения ).
Есть шесть возможностей выбора осей вращения для углов Тейта – Брайана. Шесть возможных последовательностей:
Знаки и диапазоны

Соглашение Тейта – Брайана широко используется в инженерии с разными целями. На практике существует несколько соглашений об осях для выбора подвижных и фиксированных осей, и эти соглашения определяют знаки углов. Поэтому приметы нужно изучать в каждом конкретном случае внимательно.
Диапазон углов ψ и φ составляет 2 π радиан. Для θ диапазон охватывает π радиан.
Альтернативные названия

Углы данного кадра
Правильные углы Эйлера
Как и двойная проекция унитарного вектора, Z 2 <\ displaystyle Z_ <2>> 
Углы Тейта – Брайана

Ищем выражения, похожие на предыдущие:
Последние замечания
Обратите внимание, что функции обратного синуса и косинуса дают два возможных значения аргумента. В этом геометрическом описании действительно только одно из решений. Когда углы Эйлера определены как последовательность поворотов, все решения могут быть действительными, но внутри диапазонов углов будет только одно. Это связано с тем, что последовательность поворотов для достижения целевого кадра не уникальна, если диапазоны не определены ранее.
Преобразование в другие представления ориентации
Выражение вращений в 3D как единичные кватернионы вместо матриц имеет некоторые преимущества:
Тем не менее, вычисление матрицы вращения является первым шагом для получения двух других представлений.
Матрица вращения
Любая ориентация может быть достигнута путем составления трех элементарных вращений, начиная с известной стандартной ориентации. Эквивалентно, любая матрица вращения R может быть разложена как произведение трех элементарных матриц вращения. Например:
Для простоты в следующей таблице матричных продуктов используется следующая номенклатура:
Эти табличные результаты доступны во многих учебниках. Для каждого столбца последняя строка представляет собой наиболее часто используемое соглашение.
Чтобы изменить формулы для пассивного вращения (или найти обратное активное вращение), транспонируйте матрицы (затем каждая матрица преобразует начальные координаты вектора, остающегося фиксированным, в координаты того же вектора, измеренного в повернутой системе отсчета; та же ось вращения, та же углов, но теперь вращается система координат, а не вектор).
Характеристики
Геометрическая алгебра
Высшие измерения
Можно определить параметры, аналогичные углам Эйлера, в размерностях больше трех.
Число степеней свободы матрицы вращения всегда меньше квадрата размерности матрицы. То есть не все элементы матрицы вращения полностью независимы. Например, матрица вращения в размерности 2 имеет только одну степень свободы, поскольку все четыре ее элемента зависят от одного угла поворота. Матрица вращения в размерности 3 (которая имеет девять элементов) имеет три степени свободы, соответствующие каждому независимому вращению, например, по трем углам Эйлера или кватерниону с величиной один (единичный).
В SO (4) матрица вращения определяется двумя кватернионами и поэтому является 6-параметрической (три степени свободы для каждого кватерниона). Таким образом, матрицы вращения 4 × 4 имеют 6 из 16 независимых компонентов.
Любой набор из 6 параметров, определяющих матрицу вращения, можно рассматривать как расширение углов Эйлера до размерности 4.
Приложения
Транспортные средства и движущиеся рамы
Угловая скорость твердого тела принимает простую форму с использованием углов Эйлера в движущейся системе отсчета. Кроме того, уравнения твердого тела Эйлера проще, потому что тензор инерции постоянен в этой системе отсчета.
Кристаллографическая текстура

Другие

Системы управления огнем орудия требуют корректировки углов расположения орудий (пеленга и возвышения) для компенсации наклона палубы (тангажа и крена). В традиционных системах стабилизирующий гироскоп с вертикальной осью вращения корректирует наклон палубы и стабилизирует оптические прицелы и антенну радара. Однако стволы орудия указывают в направлении, отличном от линии визирования на цель, чтобы предвидеть движение цели и падение снаряда из-за силы тяжести, среди других факторов. Артиллерийские установки катятся и наклоняются вместе с плоскостью палубы, но также требуют стабилизации. Порядок пушки включает углы, вычисленные по данным вертикального гироскопа, и эти вычисления включают углы Эйлера.
Углы Эйлера также широко используются в квантовой механике углового момента. В квантовой механике явное описание представлений SO (3) очень важно для вычислений, и почти вся работа была проделана с использованием углов Эйлера. На раннем этапе развития квантовой механики, когда физики и химики резко отрицательно отреагировали на абстрактные теоретико-групповые методы (так называемые группенпест ), использование углов Эйлера также было необходимо для фундаментальной теоретической работы.
Углы Эйлера

В сравнении с углами Эйлера, кватернионы позволяют проще комбинировать вращения, а также избежать проблемы, связанной с невозможностью поворота вокруг оси, независимо от совершённого вращения по другим осям (см. Кватернионы и вращение пространства).
Содержание
Определение
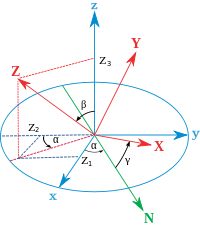
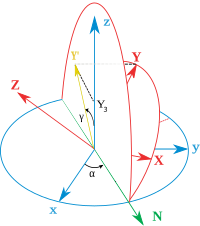
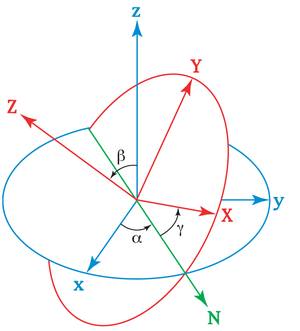
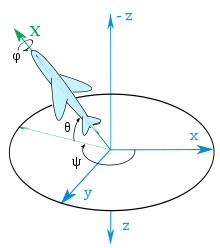
Углы Эйлера определяют три поворота системы, которые позволяют привести любое положение системы к текущему. Обозначим начальную систему координат как  , конечную как
, конечную как  . Пересечение координатных плоскостей
. Пересечение координатных плоскостей  и
и  называется линией узлов
называется линией узлов  .
.
Повороты системы на эти углы называются прецессия, нутация и поворот на собственный угол (вращение). Такие повороты некоммутативны и конечное положение системы зависит от порядка, в котором совершаются повороты. В случае углов Эйлера это последовательность 3,1,3 (Z,X,Z).
Интересные факты
Полукружные каналы во внутреннем ухе являются природным измерителем углового ускорения и частью вестибулярного аппарата человека. Схожесть с принципом углов Эйлера состоит в том, что три полукружных канала расположены перпендикулярно друг другу и заполнены жидкостью. Угловое ускорение по трём осям улавливается ворсинками, расположенными в куполе канала, когда жидкость, желая сохранить покой, проходит через них.
См. также
Литература
Полезное
Смотреть что такое «Углы Эйлера» в других словарях:
Углы — В Викисловаре есть статья «угол» Углы многозначный термин: Углы именительный падеж множественного числа слова угол … Википедия
ЭЙЛЕРА УРАВНЕНИЯ — 1) в механике динамич. и кинематич. ур ния, используемые в механике при изучении движения тв. тела; даны Л. Эйлером (L. Euler; 1765). Динамические Э. у. представляют собой дифф. ур ния движения тв. тела вокруг неподвижной точки и имеют вид: где… … Физическая энциклопедия
ЭЙЛЕРА УГЛЫ — [по имени математика и физика Л. Эйлера (L. Euler; 1707 83)] три угла, определяющие положение по отношению к неподвижной прямоугольной системе координат Oxyz твёрдого тела, к рое имеет одну неподвижную точку О. Пусть Ох у z подвижная… … Большой энциклопедический политехнический словарь
Эйлера число — e математическая константа, основание натурального логарифма, иррациональное и трансцендентное число. Иногда число e называют числом Эйлера (не путать с т. н. числами Эйлера I рода) или числом Непера. Обозначается строчной латинской буквой «e».… … Википедия
Эйлера уравнения — 1) в механике динамические и кинематические уравнения, используемые при изучении движения твёрдого тела; даны Л. Эйлером в 1765. Динамические Э. у. представляют собой дифференциальные уравнения движения твёрдого тела вокруг… … Большая советская энциклопедия
Список объектов, названных в честь Леонарда Эйлера — Существует множество математических и физических объектов, названных в честь Леонарда Эйлера: Содержание 1 Теоремы 2 Лемма 3 Уравнения 4 … Википедия
Интеграл Эйлера — Существует множество математических и физических объектов, названных в честь Леонарда Эйлера: Содержание 1 Теоремы 2 Лемма 3 Уравнения 4 Тождества 5 … Википедия
Число Эйлера — e математическая константа, основание натурального логарифма, иррациональное и трансцендентное число. Иногда число e называют числом Эйлера (не путать с т. н. числами Эйлера I рода) или числом Непера. Обозначается строчной латинской буквой «e».… … Википедия
Л. Эйлер — Леонард Эйлер Leonhard Euler Портрет 1756 года, выполненный Эмануэлем Хандманном Дата рождения: 4 (15) апреля 1707 Место рождения: Базель, Швейцария Дата смерти: 7 (18) сентября … Википедия
Угол Эйлера

Либо второе и третье повороты вращаются вокруг ранее повернутых осей координат ( внутренние вращения) или всегда вокруг исходных осей координат ( внешние вращения).
оглавление
история


Фактические углы Эйлера

Геометрическое описание
Описание внутренними вращениями
При этих поворотах одна за другой создаются новые системы координат:
Такое разбиение на повороты, каждое из которых вращается вокруг совместно повернутых осей координат, называется собственной последовательностью вращения.
Описание внешними вращениями

Такая последовательность вращения, которая всегда вращается вокруг исходных осей координат, называется внешней последовательностью вращения.
Таким образом, описания внутренним и внешним вращениями эквивалентны. Однако описание собственными вращениями более наглядно, а описание внешними вращениями математически более доступно.
Описание по матрицам
Матрица отображения (активное вращение)
В отображении матрицы для вращения вокруг осей координат (элементарные матрицы вращения):
Матрица вращения составного вращения получается умножением матриц из матриц отдельных вращений. Поскольку элементарные матрицы вращения описывают вращения вокруг исходных координатных осей, используется внешняя последовательность вращения.
и получает матрицу отображения
Матрица трансформации
Условные обозначения
Есть шесть различных способов выбора осей для фактических углов Эйлера. Первая и третья оси у всех одинаковые. Шесть вариантов:
Карданный угол
С карданными углами (в честь Джероламо Кардано ) или углами Тейта-Брайана (названными в честь Питера Гатри Тейта и Джорджа Хартли Брайана ) три поворота происходят вокруг трех разных осей. Как и в случае с действительными углами Эйлера, существует шесть возможных последовательностей вращения:
Углы крена, тангажа и рыскания: условные обозначения zy′-x ″
описание

Матрицы трансформации
Преобразование координат из закрепленного тела в пространственно фиксированную систему координат осуществляется матрицей
описано. Обратное преобразование из пространственно фиксированной системы координат в фиксированную на теле описывается транспонированием этой матрицы. (На самом деле обратное, но с вращающимися матрицами обратное то же, что и транспонированная матрица.)
Пример применения
грамм → Э. знак равно ( 0 0 м грамм ) <\ Displaystyle <\ vec
Вывод матрицы в общем случае.
Для любого выбора последовательности осей вращения результирующую матрицу вращения можно легко получить с помощью следующего соотношения (активные вращения):
Результат, интерпретация
Математические свойства
Минусы, альтернативы
У углов Эйлера есть несколько недостатков для представления поворотов:
Приложения

В компьютерной графике углы Эйлера используются для описания ориентации объекта.
В твердотельном ЯМР углы Эйлера используются для теоретического описания и моделирования спектров.
Углы Эйлера
Они также могут представлять ориентацию мобильной системы отсчета в физике или ориентацию общего базиса в трехмерной линейной алгебре. Позже Питер Гатри Тейт и Джордж Брайан представили альтернативные формы, предназначенные для использования в аэронавтике и технике.
Содержание
Эквивалентность цепных вращений [ править ]
Углы Эйлера могут быть определены элементарной геометрией или композицией поворотов. Геометрическое определение демонстрирует, что трех составных элементарных вращений (вращений вокруг осей системы координат ) всегда достаточно для достижения любого целевого кадра.
Без учета возможности использования двух различных соглашений для определения осей вращения (внутренней или внешней) существует двенадцать возможных последовательностей осей вращения, разделенных на две группы:
Правильные углы Эйлера [ править ]
Геометрическое определение [ править ]
Соглашения по внутреннему вращению [ править ]
Соглашения по внешнему вращению [ править ]
Знаки, диапазоны и условные обозначения [ править ]
О диапазонах (с использованием обозначения интервалов ):
Есть шесть возможностей выбора осей вращения для собственных углов Эйлера. Во всех них первая и третья оси вращения совпадают. Шесть возможных последовательностей:
Прецессия, нутация и собственное вращение [ править ]
Статическое определение подразумевает, что:
Хотя все три движения могут быть представлены оператором вращения с постоянными коэффициентами в некоторой системе отсчета, они не могут быть представлены этими операторами одновременно. При заданной системе отсчета максимум одна из них будет без коэффициентов. Только прецессия может быть выражена в общем виде в виде матрицы в основе пространства без зависимостей других углов.
Эти движения также действуют как карданный подвес. Если мы предположим набор кадров, каждый из которых может перемещаться по отношению к предыдущему только под одним углом, как у подвеса, будет существовать внешний фиксированный кадр, один последний кадр и два кадра посередине, которые называются «промежуточными». кадры ». Два в середине работают как два карданных кольца, которые позволяют последней рамке достигать любой ориентации в пространстве.
Углы Тейта – Брайана [ править ]
Определения [ править ]
Это подразумевает другое определение линии узлов геометрической конструкции. В случае собственных углов Эйлера он был определен как пересечение двух гомологичных декартовых плоскостей (параллельных, когда углы Эйлера равны нулю; например, xy и XY ). В случае углов Тейта – Брайана он определяется как пересечение двух негомологических плоскостей (перпендикулярных, если углы Эйлера равны нулю; например, xy и YZ ).
Соглашения [ править ]
Три элементарных поворота могут происходить либо вокруг осей исходной системы координат, которая остается неподвижной ( внешние вращения ), либо вокруг осей вращающейся системы координат, которая меняет свою ориентацию после каждого элементарного вращения ( внутренние вращения ).
Есть шесть возможностей выбора осей вращения для углов Тейта – Брайана. Шесть возможных последовательностей:
Знаки и диапазоны [ править ]
Соглашение Тейта – Брайана широко используется в инженерии с разными целями. На практике существует несколько соглашений об осях для выбора подвижных и фиксированных осей, и эти соглашения определяют знаки углов. Поэтому знаки необходимо изучать в каждом конкретном случае внимательно.
Диапазон углов ψ и φ составляет 2 π радиан. Для θ диапазон охватывает π радиан.
Альтернативные названия [ править ]
Углы данного кадра [ править ]
Правильные углы Эйлера [ править ]
Как и двойная проекция унитарного вектора, Z 2 <\displaystyle Z_<2>>
Углы Тейта – Брайана [ править ]
Ищем выражения, похожие на предыдущие:
Последние замечания [ править ]
Обратите внимание, что функции обратного синуса и косинуса дают два возможных значения для аргумента. В этом геометрическом описании действительно только одно из решений. Когда углы Эйлера определены как последовательность поворотов, все решения могут быть действительными, но внутри диапазонов углов будет только одно. Это связано с тем, что последовательность поворотов для достижения целевого кадра не уникальна, если диапазоны не определены ранее. [2]
Преобразование в другие представления ориентации [ править ]
Выражение вращений в 3D в виде единичных кватернионов вместо матриц имеет некоторые преимущества:
Матрица вращения [ править ]
Любая ориентация может быть достигнута путем составления трех элементарных вращений, начиная с известной стандартной ориентации. Эквивалентно, любая матрица вращения R может быть разложена как произведение трех элементарных матриц вращения. Например:
Для простоты в следующей таблице матричных продуктов используется следующая номенклатура:
Чтобы изменить формулы для пассивного вращения (или найти обратное активное вращение), транспонируйте матрицы (затем каждая матрица преобразует начальные координаты вектора, остающегося фиксированным, в координаты того же вектора, измеренного в повернутой системе отсчета; та же ось вращения, та же углов, но теперь вращается система координат, а не вектор).
Свойства [ править ]
Геометрическая алгебра [ править ]
Высшие измерения [ править ]
Можно определить параметры, аналогичные углам Эйлера, в размерностях больше трех. [5]
Число степеней свободы матрицы вращения всегда меньше квадрата размерности матрицы. То есть не все элементы матрицы вращения полностью независимы. Например, матрица вращения в размерности 2 имеет только одну степень свободы, поскольку все четыре ее элемента зависят от одного угла поворота. Матрица вращения в размерности 3 (которая имеет девять элементов) имеет три степени свободы, соответствующие каждому независимому вращению, например, по ее трем углам Эйлера или кватерниону величиной один (единичный).
В SO (4) матрица вращения определяется двумя кватернионами и, следовательно, является 6-параметрической (три степени свободы для каждого кватерниона). Таким образом, матрицы вращения 4 × 4 имеют 6 из 16 независимых компонентов.
Любой набор из 6 параметров, определяющих матрицу вращения, можно рассматривать как расширение углов Эйлера до измерения 4.
Приложения [ править ]

Транспортные средства и движущиеся рамы [ править ]
Угловая скорость твердого тела принимает простую форму с использованием углов Эйлера в движущейся системе отсчета. Кроме того, уравнения твердого тела Эйлера проще, потому что тензор инерции постоянен в этой системе отсчета.
Кристаллографическая текстура [ править ]
Другое [ править ]

Системы управления огнем орудия требуют корректировки углов расположения орудий (пеленг и подъем) для компенсации наклона палубы (тангажа и крена). В традиционных системах стабилизирующий гироскоп с вертикальной осью вращения корректирует наклон палубы и стабилизирует оптические прицелы и антенну радара. Однако стволы орудия указывают в направлении, отличном от линии визирования цели, чтобы предвидеть движение цели и падение снаряда под действием силы тяжести, среди других факторов. Артиллерийские установки катятся и наклоняются вместе с плоскостью палубы, но также требуют стабилизации. Порядок пушки включает углы, вычисленные из данных вертикального гироскопа, и эти вычисления включают углы Эйлера.
Углы Эйлера также широко используются в квантовой механике углового момента. В квантовой механике явное описание представлений SO (3) очень важно для вычислений, и почти вся работа была проделана с использованием углов Эйлера. В ранней истории квантовой механики, когда физики и химики резко отрицательно отреагировали на абстрактные теоретико-групповые методы (так называемые группенпест ), использование углов Эйлера также было важным для фундаментальной теоретической работы.