Виды возбуждения и схемы включения двигателей постоянного тока.
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым, параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи. В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось. •
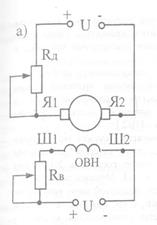
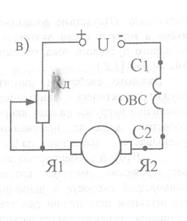
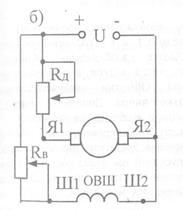
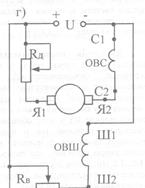
Рис. 8. Виды возбуждения машин постоянного тока,
Долнительное сопротивление в цепи обмотки якоря, Rв- Дополнительное сопротивление в цепи обмотки возбуждения.
полностью. Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10. 40 раз [1,2].
Важным свойством двигателя параллельного возбуждения служит’ практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% [1,12].
Двигатели последовательного возбуждения (сериесные) включаются по схеме, рис.8, в. Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря. Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5. 2,5)Iн. После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается. В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя [1,6,12 ]. Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту врашения в широких пределах.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
6. Обозначение машин постоянного тока.
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий [5,6,8].
Двигатели серий 2П и 4Пподразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А. Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух Длин ( М и L ).
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы [12]:
Микромашины ………………………. меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,Высокого напряжения
По частоте вращения машины постоянного тока могут быть представлены как:
Большая Энциклопедия Нефти и Газа
Независимое возбуждение двигателя ( табл. 17.3) используется в тех случаях, когда напряжение на зажимах якоря изменяется в процессе работы или напряжение возбуждения отличается от напряжения якоря. [1]
Обмотка независимого возбуждения двигателя питается от статического тиристорного преобразователя при напряжении 110 В и остается включенным до тех пор, лока лифт находится в рабочем состоянии. [2]
Использование тягового генератора в качестве возбудителя дает возможность осуществить независимое возбуждение двигателей при электрическом торможении. Это обеспечивает гибкость управления скоростью движения при плавном регулировании тормозного усилия в широком диапазоне. [5]
При помощи контакторов ШВ и ШХ замыкаются цепи обмоток независимого возбуждения двигателей поворота и хода. Контакторы 1KB, 2KB и ШВ срабатывают одновременно при повороте в одну сторону переключателя 6 ( см. рис. 185), установленного на пульте управления, при выключенных контакторах КХ ( см. рис. 169), ЗКВ, 4KB и ШХ. Последние срабатывают при повороте того же переключателя в другую сторону; при этом контакторы 1KB, 2KB и ШВ выключены. [6]
Кроме того, в цепь якоря включен Датчик нулевого тока Дт. Обмотка независимого возбуждения двигателя ОВМ получает питание от отдельного источника. [8]
Низковольтные контакторы используются в электрических цепях низкого напряжения при сравнительно больших токах и индуктивности. На электровозах с рекуперативным торможением эти контакторы применяются в цепях обмоток независимого возбуждения двигателя и генератора преобразователя. [10]
При этом способе торможения может вначале происходить интенсивное самовозбуждение, которое приводит к значительному скачку тормозного момента. Последний при сравнительно больших маховых массах механизма может вызвать нежелательные удары в механизме. Поэтому чаще применяется динамическое торможение с независимым возбуждением двигателя последовательного возбуждения по схеме, представленной на рис. 3.20. Обмотка возбуждения в этом случае подключается к сети через резистор, ограничивающий ток до номинального значения. [13]
Электродвигатели постоянного тока
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Как устроены электродвигатели постоянного тока
Работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. Из основ электротехники известно, что на проводник с током, помещенный в магнитное поле, действует сила, определяемая по правилу левой руки :
где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
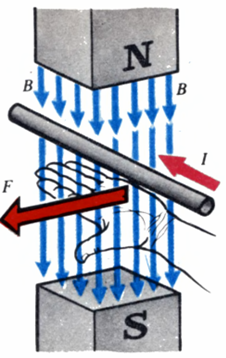
При пересечении проводником магнитных силовых линий машины в нем наводится электродвижущая сила, которая по отношению к току в проводнике направлена против него, поэтому он а называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Коммутация в электродвигателях постоянного тока
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток. Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.

Способы возбуждения электродвигателей постоянного тока
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы :
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Типы двигателей постоянного тока
Двигатели постоянного тока прежде всего различаются по характеру возбуждения. Двигатели могут быть независимого, последовательного и смешанного возбуждения. Параллельное возбуждение можно не рассматривать. Даже если обмотка возбуждения подключается к той же сети, от которой питается цепь якоря, то и в этом случае ток возбуждения не зависит от тока якоря, так как питающую сеть можно рассматривать как сеть бесконечной мощности, а ее напряжение постоянным.
Обмотку возбуждения всегда подключают непосредственно к сети, и поэтому введение добавочного сопротивления в цепь якоря не оказывает влияния на режим возбуждения. Той специфики, которая существует при параллельном возбуждении в генераторах, здесь быть не может.
В двигателях постоянного тока малой мощности часто используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом существенно упрощается схема включения двигателя, уменьшается расход меди. Следует однако иметь в виду, что, хотя обмотка возбуждения исключается, габариты и масса магнитной системы не ниже, чем при электромагнитном возбуждении машины.
Свойства двигателей в значительной мере определяются их системой возбуждения.
Следует, однако, иметь в виду, что скорость вращения рабочих органов производственных машин существенно ниже. Поэтому между двигателем и рабочей машиной приходится устанавливать редуктор. Чем больше скорость двигателя, тем более сложным и дорогим получается редуктор. В установках большой мощности, где редуктор представляет собой дорогостоящий узел, двигатели проектируются на существенно меньшие скорости.
Следует еще иметь в виду, что механический редуктор всегда вносит значительную погрешность. Поэтому в прецизионных установках желательно использовать тихоходные двигатели, которые можно было бы сочленить с рабочими органами либо напрямую, либо посредством простейшей передачи. В связи с этим появились так называемые высокомоментные двигатели на низкие скорости вращения. Эти двигатели нашли широкое применение в металлорежущих станках, где сочленяются с органами перемещения без каких-либо промежуточных звеньев посредством шарико-винтовых передач.
Электрические двигатели отличаются также по конструктивным при знакам, связанным с условиями их работы. Для нормальных условий используются так называемые открытые и защищенные двигатели, охлаждаемые воздухом помещения, в котором они устанавливаются.
Воздух продувается через каналы машины посредством вентилятора, размещенного на валу двигателя. В агрессивных средах используются закрытые двигатели, охлаждение которых осуществляется за счет внешней ребристой поверхности или наружного обдува. Наконец, выпускаются специальные двигатели для взрывоопасной среды.
Для уменьшения индуктивности обмотки ее укладывают не в пазы, а на поверхность гладкого якоря. Крепится обмотка клеющими составами типа эпоксидной смолы. При малой индуктивности обмотки существенно улучшаются условия коммутации на коллекторе, отпадает необходимость в дополнительных полюсах, может быть использован коллектор меньших размеров. Последнее дополнительно уменьшает момент инерции якоря двигателя.
Еще большие возможности для снижения механической инерции дает использование полого якоря, представляющего собой цилиндр из изоляционного материала. На поверхности этого цилиндра располагается обмотка, изготовляемая печатным способом, штамповкой или из про волоки по шаблону на специальном станке. Крепление обмотки осуществляется клеющими материалами.
Внутри вращающегося цилиндра располагается стальной сердечник, необходимый для создания путей прохождения магнитного потока. В двигателях с гладким и полым якорями вследствие увеличения зазоров в магнитной цепи, обусловленного внесением в них обмотки и изоляционных материалов, требуемая намагничивающая сила для проведения необходимого магнитного потока существенно возрастает. Соответственно магнитная система получается более развитой.
К числу малоинерционных двигателей относятся также двигатели с дисковыми якорями. Диски, на которые наносятся или наклеиваются обмотки, изготовляются из тонкого изоляционного материала, не подверженного короблению, например из стекла. Магнитная система при двухполюсном исполнении представляет собой две скобы, на одной из которых размещены обмотки возбуждения. В связи с малой индуктивностью обмотки якоря машина, как правило, не имеет коллектора и съем тока осуществляется щетками непосредственно с обмотки.
Следует еще упомянуть о линейном двигателе, обеспечивающем не вращательное движение, а поступательное. Он представляет собой двигатель, магнитная система которого как бы развернута и полюсы устанавливаются на линии движения якоря и соответствующего рабочего органа машины. Якорь обычно выполняется как малоинерционный. Габариты и стоимость двигателя велики, так как необходимо значительное число полюсов для обеспечения перемещения на заданном отрезке пути.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с. и напряжение в якоре равна нулю, поэтому Iп = U / Rя.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
где U — напряжение питающей сети; Iя — ток якоря; R я — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Механические характеристики электродвигателя постоянного тока при различных способах регулирования частоты вращения

Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
 Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Генераторы независимого возбуждения
Свойства генераторов анализируются с помощью характеристик, которые устанавливают зависимости между основными величинами, определяющими работу генераторов. Такими основными величинами являются: 1) напряжение на зажимах U, 2) ток возбуждения iв, 3) ток якоря Iа или ток нагрузки I, 4) скорость вращения n.
Обычно генераторы работают при n = const. Поэтому основные характеристики генераторов определяются при n = nн = const.
Существуют пять основных характеристик генераторов: 1) холостого хода, 2) короткого замыкания, 3) внешняя, 4) регулировочная, 5) нагрузочная.
Все характеристики могут быть определены как экспериментальным, так и расчетным путем.
Рассмотрим основные характеристики генератора независимого возбуждения.
Характеристика холостого хода
Характеристика холостого хода (х. х. х.) U = f (iв) при I = 0 и n = const определяет зависимость напряжения или электродвижущей силы (э. д. с.) якоря Eа от тока возбуждения при холостом ходе (I = 0, P2 = 0). Характеристика снимается экспериментально по схеме рисунка 1, а при отключенном рубильнике.
Рисунок 1. Схемы генераторов и двигателей независимого (а), параллельного (б), последовательного (в), смешанного (г) возбуждения (сплошные стрелки – направления токов в режиме генератора, штриховые – в режиме двигателя)
| Рисунок 2. Характеристика холостого хода генератора независимого возбуждения |
Снятие характеристики целесообразно начинать с максимального значения тока возбуждения и максимального напряжения U = (1,15 – 1,25) Uн (точка а кривой на рисунке 2). При уменьшении iв напряжение уменьшается по нисходящей ветви аб характеристики сначала медленно ввиду насыщения магнитной цепи, а затем быстрее. При iв = 0 генератор развивает некоторое напряжение U00 = Об (рисунок 2), обычно равное 2 – 3% от Uн, вследствие остаточной намагниченности полюсов и ярма индуктора. Если затем изменить полярность возбуждения и увеличить iв в обратном направлении, начиная с iв = 0, то при некотором iв
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)

Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.


На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам