Автомат мили и мура в чем разница

Как Юкка от Каюк: Покупайте Ваши книги на
www.ljubljuknigi.ru
Buy your books online at
wwW.get-morenooks.com
LAP LAMBERT Academic Publishing
Книги: А.И. Сапожников «Здания в земной стихии»;
«Педагогика.От диалектики к психологии» «Мудр тот, кто знает не многое, а нужное»
ПОНИМАНИЕ ПРОЦЕССА ВЫШЕ ЗНАНИЯ КАК ТАКОВОГО
Предлагаю Вам, родным, знакомым заняться наукой в моей группе (школьники, студенты, взрослые). Профессор Адольф Сапожников (АС) sapozhnikov-37@mail.ru Тел. (8512)257898, вечером по московскому времени.
Астрахань известна лишь порой Только красной рыбой и икрой, Но истинную славу победителей Ей принесут строители. Их создает из бывших школьников Академик Адольф Сапожников.
Зачитано на банкете УМО, где было принято решение об открытии АИСИ.
Мы открыли в АГТУ НОВУЮ специальность «ГИДРОТЕХНИЧЕСКОЕ СТРОИТЕЛЬСТВО», приглашаем УЧИТЬСЯ. АС
Школьники, студенты, взрослые, все желающие пусть сообщат имеющуюся или планируемую специальность для выбора темы исследований. Будем не учиться, а создавать новое и учить людей. Контакт возможен личный и ч/з Интернет. АС
Адольф Сапожников
Твои предложения? Пиши по адресу из текста. АС

Автомат Мили (англ. Mealy machine) — конечный автомат, выходная последовательность которого (в отличие от автомата Мура) зависит от состояния автомата и входных сигналов. Это означает, что в графе состояний каждому ребру соответствует некоторое значение (выходной символ). В вершины графа автомата Мили записываются выходящие сигналы, а дугам графа приписывают условие перехода из одного состояния в другое, а также входящие сигналы.
Автомат Мура (абстрактный автомат второго рода) в теории вычислений — конечный автомат, выходное значение сигнала в котором зависит лишь от текущего состояния данного автомата, и, не зависит напрямую, в, отличие от автомата Мили, от входных значений. Автомат Мура назван в честь описавшего его свойства Эдварда Ф. Мура, опубликовавшего исследования в 1956 году в издании «Gedanken-experiments on Sequential Machines.»
Автоматы Мили и Мура.
Понятие автомата. Автоматы Мили и Мура, их описание с помощью графов состояний. Построение автомата по блок-схеме алгоритма.
Теория автоматов представляет собой раздел дискретной математики, изучающий модели, преобразователи дискретной информации. Такими преобразователями являются как реальные устройства: компьютеры, живые организмы; так и воображаемые устройства: аксиоматические теории, математические машины.
Абстрактный автомат – это математическая модель, описывающая техническое устройство совокупностью входных, выходных сигналов и состояний.
Для описания автомата используют так называемую «шестёрку»:  , где:
, где:
множество  – множество состояний;
– множество состояний;
множество  – множество входных символов;
– множество входных символов;
множество  – множество выходных символов;
– множество выходных символов;
функция  – функция переходов;
– функция переходов;
функция  – функция выходов;
– функция выходов;
 – начальное состояние автомата.
– начальное состояние автомата.
Рисунок 1 – Абстрактный автомат
Автоматы Мили и Мура.
В зависимости от способа определения выходного сигнала в синхронных автоматах различают:
1. Автомат первого рода, который называют автоматом Мили:
Автомат Мили задан системой канонических уравнений:
 ,
,
 .
.
Рисунок 2 – Функциональная схема автомата Мили
2. Автомат второго рода, который называют автоматом Мура:
,
 ,
,
 .
.
Рисунок 3 – Функциональная схема автомата Мура
Для задания конечного автомата  требуется описать все элементы множества . Наиболее часто используемыми формами описания элементов множества являются:
требуется описать все элементы множества . Наиболее часто используемыми формами описания элементов множества являются:
1. Табличный способ;
2. Графический способ;
3. Матричный способ.
Табличная форма автомата Мили иллюстрируется в таблице:
 |  |  |  |
 |  | |  |
| | | | |
 |  | |  |
| | | | |
| |  | |  |
| | | | |
| |  | |  |
Автомат называется частично заданным, если он определен не для всех пар переходов  . Для такого автомата на месте отсутствующего перехода ставится прочерк, как в таблице переходов, так и в таблице выходов.
. Для такого автомата на месте отсутствующего перехода ставится прочерк, как в таблице переходов, так и в таблице выходов.
Графовая форма автомата: представляется графом, в котором:
— множество  изображено вершинами графа;
изображено вершинами графа;
— функция  задана дугами графа, причем две вершины графа и
задана дугами графа, причем две вершины графа и  соединяются дугой, если в автомате существует переход из в ;
соединяются дугой, если в автомате существует переход из в ;
— множество  изображено метками дуг: ставится на дуге из вершины в вершину , если в автомате существует переход из в под действием выходного сигнала ;
изображено метками дуг: ставится на дуге из вершины в вершину , если в автомате существует переход из в под действием выходного сигнала ;
— функция  задана метками дуг (автомат Мили) или метками вершин (автомат Мура).
задана метками дуг (автомат Мили) или метками вершин (автомат Мура).
Для автомата Мили дуга из вершины в вершину помечается выходным сигналом  , если в автомате существует переход из в и при этом вырабатывается выходной сигнал .
, если в автомате существует переход из в и при этом вырабатывается выходной сигнал .
Для автомата Мура выходным сигналом помечается вершина, определяющая  .
.
Самостоятельное изучение схемотехники. Абстрактный автомат. Часть 2
Статья написана, собрана и сверстана Brotherofken. Спасибо ему огромное.
В предыдущей статье я попытался изложить все основные определения и принципы, чтобы сделать эту статью максимально понятной. Все не уместилось, так что я настоятельно советую ознакомиться с этими файлами:
Базис, Базис2, Минимизация. Далее в этой статье я оставил несколько разъясняющих пометок курсивом.
В этой статье я попробую объяснить доступным языком что такое абстрактный автомат, способы его представления. Так как теория автоматов полна математики и сложна, постараюсь писать человеческим языком, чтобы неподготовленный читатель смог понять о чём идёт речь.
Абстрактный автомат
Автомат должен будет реализовывать некоторые функции, которые заданы разработчиком. Он может быть простым сумматором, может реализовывать какую-либо микрокоманду процессора, выбирать слова из оперативной памяти или заниматься синтаксическим анализом выражения.
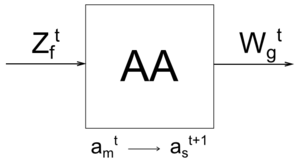
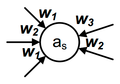
В общем виде, не вдаваясь в подробности, абстрактный автомат можно представить следующим образом: 
Или, если перейти от иллюстрации к математическому описанию:
A =
Такой автомат функционирует дискретно по времени, то есть значения входов, выходов и внутреннее состояние автомата изменяются в дискретные моменты времени.
Итак мы в общем виде описали что есть Абстрактный автомат. Примером такого автомата может быть триггер, регистр ЭВМ или сумматор.
Т.е. автомат типа Мили вырабатывает выходной сигнал когда у него меняется входной, в зависимости от его предыдущего состояния. При этом длительность выходного сигнала не зависит от длительности входного, а только от его присутствия. В автоматах типа Мура выходной сигнал зависит от состояния автомата в текущий момент времени т.е. автомат будет вырабатывать определенный выходной сигнал пока не изменит свое состояние.
Способы задания автоматов
Как мы выяснили в первой части — автомат представляет собой совокупность входного и выходного алфавитов, множества внутренних состояний и функций, определяющих переходы и выходы. Однако, обычно функции δ и λ не заданы, и поведение автомата приходится описывать по-другому.
Графы
Граф автомата – это ориентированный связный граф, вершины которого символизируют внутренние состояния автомата, а дуги – переходы из одного состояния в другое.
Для графа Мили на дугах указываются сходные и выходные буквы. Выходные буквы пишутся над дугами, символизируя то, что выходное состояние зависит от состояния автомата в предыдущий момент времени.
Для графа автомата Мура на дугах записываются только входные буквы, выходные же указываются около вершин.
Важный момент: Если из каждой вершины выходит столько дуг, сколько есть входных букв, то автомат называется полным. Другими словами – если из каждой вершины определены переходы для каждой входной буквы. В наших примерах автомат Мили является полным, а автомат Мура – частичным.
И ещё: Если из одной вершины выходит дуг больше, чем входных букв (то есть 2 и более дуг с одинаковыми входными буквами), то такой автомат называется недетерминированным. Такое может произойти при построении формализованного описания и тогда надо будет произвести переход к детерминированному автомату, но это не всегда можно выполнить. Описание этого процесса я тоже упускаю, сразу нарисовав детерминированный автомат.
На этом о графах всё.
Таблицы переходов и выходов.
Графы нагляднее для человека, а таблицы — для машины. Любой автомат можно представить в виде таблицы переходов и выходов (ТПВ). В ТПВ строками являются внутренние состояния автомата, а столбцами – входные буквы.
Построим ТПВ для наших графов Мили и Мура. Если не определена какая-либо входная или выходная буква, то вместо неё ставится прочерк. Если не определено состояние, то действует это же простое правило.
ТПВ графа Мили
В ТПВ Мили в каждой клетке записаны переходы и выходы. Например, если автомат находится в состоянии С0 и на вход приходит буква a1, то он перейдёт в состояние С1 и на выходе появится буква b3.
ТПВ графа Мура
Для графа Мура строят отмеченную таблицу переходов. Выделяется дополнительный столбец для выходных букв.
В клетке под входной буквой пишется в какое состояние автомат переходит, в крайней правой клетке — какую выходную букву возвращает.
Пример синтеза автомата
При помощи абстрактных автоматов можно описать практически что угодно. Можно описать работу цифровой схемы, а можно – синтаксический или лексический анализатор. Попробуем описать триггер – чем не автомат?
Чтобы задать граф нужно словесное описание алгоритма работы триггера. Читаем:
Кодируем входной и выходной алфавиты:
A =
B =
Строим граф автомата Мили:
Вот такая забавная чебурашка получилась :-). Теперь можно построить таблицу переходов и выходов:
Если расписать эту таблицу преобразовав условные обозначения в фактические, то получим таблицу которая представляет из себя таблицу переходов триггера. Затем её можно упростить:
Нанесём полученную функцию на карту Вейча и минимизируем:
Выпишем, что получилось:
Строим по функции схему (Выполняли домашнее задание?):
Немного непривычно видеть триггер в булевом базисе, поэтому переведём функцию в базис И-НЕ и нарисуем схему в нём:
А на схеме асинхронный RS триггер обозначается вот так:

Теперь если приложить немного старания, то можно самостоятельно синтезировать простую новогоднюю гирлянду.
Русские Блоги
Разница между конечным автоматом Мура и конечным автоматом Милли
В зависимости от того, связан ли вывод конечного автомата с входным условием, конечный автомат Мура и конечный автомат Мили различаются.
Конечный автомат Мура: вывод относится только к текущему состоянию;
Следующий пример, такой как конечный автомат для обнаружения последовательности ([FPGA] реализация конечного автомата Мура для детектора последовательности), записанный с трехэтапной записью, конечная часть конечного автомата:
Видно, что конечный автомат Мура связан только с текущим состоянием.
Вы также можете судить, посмотрев на диаграмму перехода состояний:

Конечный автомат Мили: вывод не только зависит от текущего состояния, но и связан с вводом;
Точно так же следующий пример обнаружения последовательности: [FPGA] Конечный автомат Мили, реализация детектора последовательности.
То же трехэтапное описание, выходная часть конечного автомата:
Точно так же об этом можно судить и по диаграмме переходов состояний:

Видно, что вывод связан не только с текущим состоянием и вводом.
Наконец, конечный автомат Мура и конечный автомат Мили могут быть преобразованы друг в друга. Приведенные выше две диаграммы перехода состояний фактически реализуют одну и ту же функцию, которая представляет собой последовательность 1101 обнаружения.
Автоматы Мура и Мили
Выходные сигналы АА зависят от того, что поступало на его вход раньше.
Рассмотрим функционирование автоматов Мура и Мили.
[math]a(t+1) = \delta (a(t), z(t))[/math]
[math]w(t) = \lambda (a(t), z(t))[/math]
[math]a(t+1) = \delta (a(t), z(t))[/math]
[math]w(t) = \lambda (a(t))[/math]
В автоматах Мура выходные воздействия записаны на состояниях, а в автомате Мили — на переходах.
Содержание
Применение автоматов Мура и Мили [ править ]
Автоматы Мура и Мили широко применяются при проектировании цифровых устройств на основе программируемых логических интегральных схем (ПЛИС).
Наличие минимальной выходной задержки, связанной с переключением выходного регистра, отсутствие нестабильности переходного процесса на выходе автомата, отсутствие сквозного распространения сигнала через комбинационную схему от входа до выхода автомата, простота описания на языках описания аппаратуры HDL делает автомат Мура практически незаменимым.
Также автоматы Мура и взаимодействующие автоматы Мили используются в генетическом программировании (например, для решения задачи об «Умном муравье» [1] ).
Автомат, регулирующий пешеходный переход [ править ]
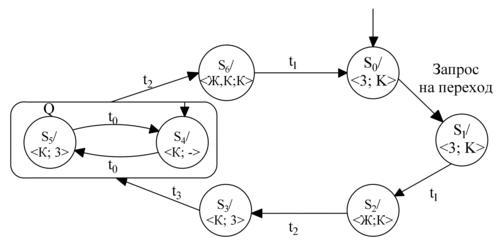
Рассмотрим автомат, регулирующий пешеходный переход по запросу пешеходов. Внешние события автомата — это события нажатия пешеходами кнопки-запроса на тротуаре и исчерпание тайм-аута. Автомат строится как автомат Мура, в котором выход — регулирование светофора и разрешающий сигнал на переход — это потенциальные сигналы, являющиеся функциями состояния.
Торговый автомат [ править ]
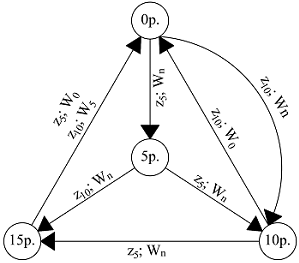
В качестве примера применения автомата Мили рассмотрим автомат по продаже шоколадок стоимостью [math]20[/math] рублей, принимающий монеты номиналом в [math]5[/math] и [math]10[/math] рублей и возвращающий сдачу, если это необходимо.
Входных сигналов [math]Z[/math] два: [math]Z_5[/math] — [math]5[/math] рублей и [math]Z_<10>[/math] — [math]10[/math] рублей.
Выходных сигналов [math]W[/math] три: [math]W_
Способы задания автоматов [ править ]
Табличный способ задания автомата Мили [ править ]
Автомат Мили может быть задан таблицей переходов и таблицей выходов.
| [math]a_ | ||
| [math]z_ | [math]a_ | [math]=\delta (a_ |
| [math]a_ | ||
| [math]z_ | [math]w_ | [math]=\lambda (a_ |
Пример: Задание автомата Мили табличным способом (автомат имеет два входных сигнала, два выходных сигнала и три состояния).
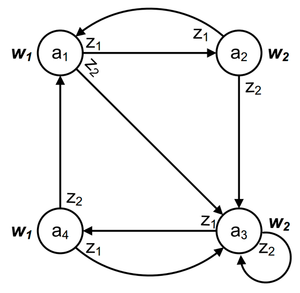
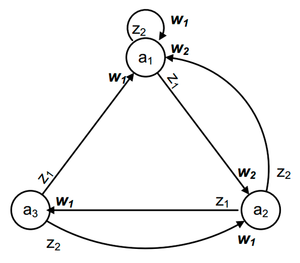
| [math]\delta[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] | [math]a_<3>[/math] |
| [math]z_<1>[/math] | [math]a_<1>[/math] | [math]a_<3>[/math] | [math]a_<1>[/math] |
| [math]z_<2>[/math] | [math]a_<2>[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] |
| [math]\lambda[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] | [math]a_<3>[/math] |
| [math]z_<1>[/math] | [math]w_<2>[/math] | [math]w_<2>[/math] | [math]w_<2>[/math] |
| [math]z_<2>[/math] | [math]w_<1>[/math] | [math]w_<1>[/math] | [math]w_<2>[/math] |
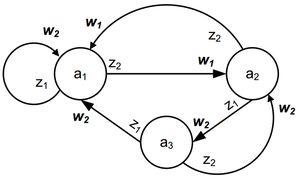
Графический способ задания автомата Мили [ править ]
На рисунке приведен граф автомата Мили на 3 состояния, имеющий 2 входных сигнала и 2 выходных сигнала (см. предыдущий пример).
Табличный способ задания автомата Мура [ править ]
В автомате Мура выходной сигнал зависит только от состояния автомата и не зависит от входного сигнала.
Поэтому достаточно для задания автомата Мура в таблице переходов добавить одну строку.
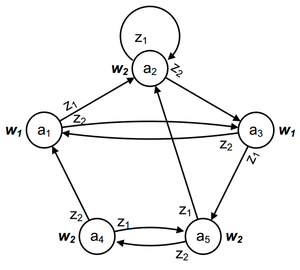
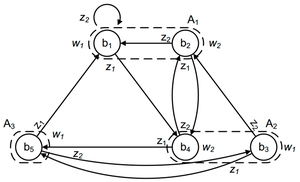
| [math]\lambda[/math] | [math]w_<1>[/math] | [math]w_<2>[/math] | [math]w_<1>[/math] | [math]w_<2>[/math] | [math]w_<2>[/math] |
| [math]\delta[/math] | [math]a_<1>[/math] | [math]a_<2>[/math] | [math]a_<3>[/math] | [math]a_<4>[/math] | [math]a_<5>[/math] |
| [math]z_<1>[/math] | [math]a_<2>[/math] | [math]a_<2>[/math] | [math]a_<5>[/math] | [math]a_<5>[/math] | [math]a_<2>[/math] |
| [math]z_<2>[/math] | [math]a_<3>[/math] | [math]a_<3>[/math] | [math]a_<1>[/math] | [math]a_<1>[/math] | [math]a_<4>[/math] |
Графический способ задания автомата Мура [ править ]
На рисунке приведен граф автомата Мура на 5 состояний, имеющий 2 входных сигнала и 2 выходных сигнала.
Реакция автоматов на входное слово [ править ]
Автомат Мили [ править ]
Допустим, входное слово [math]\xi[/math] поступает на вход автомата буква за буквой.
Выходное слово [math]\omega[/math] называется реакцией автомата Мили на входное слово [math]\xi[/math] в состоянии [math]a_<1>[/math] строится по таблице переходов и выходов).
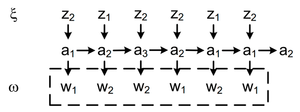
Реакцию автомата на входное слово [math]\xi[/math] можно заменить обходом графа.
Автомат Мура [ править ]
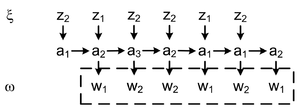
В рассматриваемом примере для автоматов Мили и Мура реакции автоматов на одинаковое входное слово совпадают, но они сдвинуты на один такт. Автоматы Мили и Мура дающие одинаковые реакции на одинаковые входные слова называются эквивалентными. Данное замечание приводит к задаче построения эквивалентных автоматов, дающих одинаковые реакции на одинаковые входные слова.
Эквивалентность автоматов Мили и Мура [ править ]
Автомат Мура переходит в автомат Мили, если всем переходам в состояние поставить выходные воздействия этого состояния. После таких преобразований получим эквивалентный автомат Мили.
Однако, чтобы преобразовать автомат Мили в автомат Мура такой алгоритм не подходит, т.к. в одно состояние могут вести разные переходы. Но можно просто добавить новых состояний, устанавливая необходимые соответствия.
Далее будет приведено формальное доказательство факта эквивалентности с явным предъявлением конструкции.
| Теорема (Эквивалентность автоматов Мура и Мили): | |||||||
| Мура | Мили |
| [math]\delta _ (a_ | [math]\delta _ (a_ |
| [math]\lambda _(a_ | [math]\lambda _ (a_ |
При переходе от автомата Мура к автомату Мили функции переходов также совпадают, а для определения функции выходов выходные сигналы с вершин опускается на входные дуги.
Проделав такие преобразования мы должны доказать, что получили автомат Мили, эквивалентный автомату Мура, т.е. что реакции автоматов на одинаковые входные воздействия совпадают.
При таком переходе (Мура к Мили) число состояний совпадает.
Таким образом, для выходной последовательности длины 1 поведение автоматов [math]S_<1>[/math] и [math]S_<2>[/math] полностью совпадает. Далее по индукции получаем эквивалентность автоматов.
Переход от автомата Мили к автомату Мура [ править ]
Требуется перейти к автомату Мура
Для определения алфавита состояний, функций переходов и выходов автомата Мура воспользуемся следующей вспомогательной таблицей.
| Мура | Мили |
 | [math]A_ |
| [math]a_<1>: A_ <1>= \left \ < \begin | [math]a_<2>: A_ <2>= \left \ < \begin | [math]a_<3>: A_ <3>= \< (a_<3>, w_<1>) \> = b_<5>[/math] |
При определении функции переходов результирующего автомата Мура из всех состояний, порожденных одним состоянием автомата Мили, должны быть переходы под воздействием одинаковых входных сигналов.
Поскольку в автомате Мура выходной сигнал зависит только от состояния автомата, то в примере рядом с состояниями проставим соответствующие выходные сигналы.
И так если осуществить следующие преобразования, то получим:
| Мили | Мура | Мили |
| [math]S_ <1>\rightarrow[/math] | [math]S_ <2>\rightarrow[/math] | [math]S_<3>[/math] |
| 3 состояния | 5 состояний | 5 состояний |
Методы взаимной транспозиции автоматов Мили и Мура показывают, что при переходе от автомата Мили к автомату Мура число состояний принципиально не меняется. В то время как при обратном переходе в автомат Мура число состояний, как правило, увеличивается. Вследствие транзитивности отношения эквивалентности два автомата Мили, первый из которых получен из автомата Мура, так же будут эквивалентны, но у второго автомата число состояний будет больше. Таким образом эквивалентные между собой автоматы могут иметь различное число состояний. В связи с чем и возникает задача нахождения минимального автомата в классе эквивалентных между собой автоматов. Существование для любого абстрактного автомата эквивалентного ему абстрактного автомата с минимальным числом внутренних состояний впервые было доказано Муром.