Вилли на мотоцикле – азы и первые правила

Нужно ли включать режим зануды, чтобы напоминать, что обучение вилли должно проходить не на дороге общего пользования, где малейший огрех может закончиться фееричным падением и случайными жертвами, задетыми по инерции мотоциклом. Естественно, мотоциклист должен быть полностью экипирован, чтобы в случае падения не расплатиться за ошибку здоровьем.

Вилли кажется простым трюком, когда его делают профессионалы или достаточно опытные мотоциклисты. Однако нюансов в исполнении много, а во время обучения ошибки стоят дорого. Здесь имеет значение буквально все: подготовка водителя, момент для подъема колеса, положение тела от начала до конца исполнения вилли, реакция в момент опускания колеса, сам мотоцикл и его техническое состояние… В данной статье мы не говорим о профессиональных стантрайдерах, но оглядывается на их опыт и наработки.
Предупреждение
Любой профессиональный «трюкач» подскажет, что для постоянных кульбитов мотоциклу потребуется помощь механика. Дело в том, что при долгой езде на заднем колесе у байка начинается банальное масляное голодание. Оно и понятно, законы физики никто не отменял! Поднятый вертикально мотоцикл провоцирует стекать технические жидкости, которые уже не распределяются равномерно по картеру и деталям, а под собственным весом стремятся вниз. Это относится и к бензину в бензобаке.

Второй проблемой может стать сама конструкция мотоцикла. На коротких байках встать на заднее колесо гораздо проще, чем на длинных. Совсем не зря на некоторых моделях специально ставят удлиненный маятник, в том числе это распространенная практика для мощных мотоциклов, на которых откровенно дрифтят и всячески препятствуют появлению вилли за счет конструкции.

В копилку проблем, созданных самим мотоциклом, можно отнести длинные выхлопные трубы. Если встать на заднее колесо и выровняться практически в «свечку», не забывайте следить, не цепляете ли вы трубами или номерным знаком асфальт. Искры, конечно, красоты добавляют, но это лишний повод потерять равновесие и потом «лечить» царапины боевого коня.
В общем, если есть желание поднимать свой байк на заднее колесо просто для красоты, по настроению пощекотать нервы себе и встречным водителям автомобилей, нужно понимать, как ваша модель мотоцикла вообще переносит подобные фокусы, и за какую грань перешагивать чревато.

На качестве вилли сказывается даже состояние задней покрышки и давления в ней. Профессионалы вообще снижают давление, чтобы увеличить пятно контакта и добавить устойчивости.
Бонус
Что опаснее всего в выполнении вилли: подъем на заднее колесо или спуск обратно? Так или иначе, вернуть колесо на асфальт дело далеко не последнее. При резком ударе можно словить воблинг или вовсе не удержать руль, и совершить таки не очень звездное, но приземление кубарем. В такие моменты новичков выручает демпфер. У опытных мотоциклистов, практикующих езду в вилли, «глаз наметан». Они способны опустить байк аккуратно. В этом им помогает расслабленная посадка (дабы не допустить перехода колебаний от колеса через водителя на весь мотоцикл) и правильное положение тела.

Обучение
Для обучения многие используют легкие кроссовые мотоциклы, которые не так страшно перевалять по песку, как спортбайк обшарпать об асфальт. Вариантов техники для обучения много, главное, чтобы минимум пластика, короткая база и живучесть в падениях.
Практика должна проходить на изолированных от активного движения площадках. В идеале обратиться к более опытным мотоциклистам, инструкторам или взять несколько уроков в школах, способных научить подобным элементам.

Самым безопасным способом наработать навыки езды на заднем колесе будет практика на вилли машине… кстати есть у «Партнер-Мото». Суть вилли машины в том, что водитель перестает бояться падения, так как его ограничивает и удерживает техника. Фатальные ошибки не закончатся печальным исходом.
Сложность вилли не только в подъеме и опускании переднего колеса, но и в удержании мотоцикла в ровном положении без отклонений в бок, из-за чего можно просто завалиться, не говоря уже об опрокидывании назад.

Первые попытки выполнить вилли рекомендуют делать на первой передаче. Суть не в том, чтобы разгоняться до космической скорости, а в том, чтобы накрутить обороты, и мотоцикл устойчиво ехал на холостых с закрытым газом. Новичкам советуют поднимать переднее колесо сцеплением, так как это позволяет работать на низких скоростях без резких рывков. О тонкостях работы газом, сцеплением и тормозом поговорим в отдельной статье. Сейчас обратим внимание, что в обучении не рекомендуется переключать передачи.
Чтобы попробовать поднять мотоцикл в вилли и не бояться разбить свой байк, можно обратиться в «Партнер-Мото», чтобы получить навыки езды на заднем колесе при помощи вилли машины и специально подготовленного мотоцикла.
Антивилли для мотоцикла что это
Блог им. AntonKatenev
Блог им. AntonKatenev → Краткий ликбез по электронным подвескам мотоциклов
Продолжаем цикл статей по электронным системам современных мотоциклов. Предыдущие вы можете найти в моих постах.
На этот раз подошла очередь поговорить об электронных подвесках. Тема достаточно сложная, подробное описание было бы целой монографией с большим количеством математики, поэтому буду сильно сокращать и упрощать, делая упор в основном на практических аспектах.

Для начала разберемся, что такое «электронная подвеска», и при чем тут вообще электроника. Тем более, что в этой области есть определенная путаница в названиях, то она «электронная», то «адаптивная», то «активная», то еще что-то в этом роде. Вообще говоря, электронику в подвесках можно применять разными способами, что создает несколько совершенно разных типов электронных подвесок:
Начнем с самого простого, а именно с электронно-регулируемой подвески. Это на самом деле обычная регулируемая подвеска, но вместо ручной регулировки применяются электроприводы, которые управляются блоком электроники. Это наиболее простой и наиболее распространенный вариант, типичный его представитель — BMW ESA. По принципу работы, и по принципу регулирования такая подвеска ничем не отличается от обычной, но для того, чтобы изменить ее настройки, не нужно крутить руками, достаточно просто нажать пару кнопок. Чаще всего настройки такой подвески завязаны с режимами езды мотоцикла, а также можно выбрать нагрузку, например езду с пассажиром. Никаких дополнительных датчиков, кроме, собственно датчиков положения регуляторов, там нет, да и не нужны. Такая подвеска довольно удобна, но по своим свойствам, и по диапазону регулирования она ничем не отличается от обычной. Регулировка происходит достаточно медленно, и иногда можно слышать жужжание привода. Чаще всего такая подвеска регулируется не плавно, а заранее заданными «ступеньками», которые могут быть завязаны на другие режимы мотоцикла, или на заранее предустановленные градации нагрузки, типа один, с багажом, с пассажиром, с пассажиром и багажом. Но если залезть в меню, то можно выставить подвеску более точно (не на всех мотоциклах).
Устроено это примерно вот так, на примере ESA:
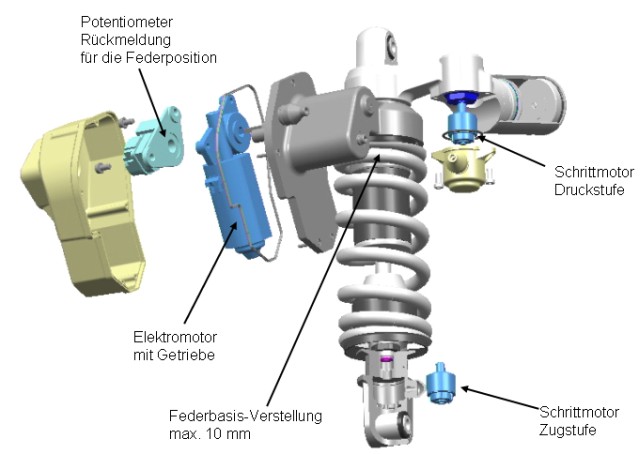
Видно, что все регулировки на своих обычных местах, но вместо ручных крутилок установлены сервоприводы, большой занимается предварительным поджатием, где нужен большой момент, а двигатели поменьше регулируют демпфирование сжатия и отбоя. Вот этот большой привод и жужжит своим редуктором.
На Гусе ESA отлично работает, и ее разные положения очень неплохо чувствуются. Это удобно, едешь по трассе — поставил одни настройки, съехал на грунт — другие, для этого даже не надо останавливаться.
Но надо понимать, что электронно-регулируемая подвеска не дает ничего, кроме удобства. Впрочем, очень многие мотоциклисты ленивы, и вообще никогда не регулируют подвеску, которая всегда находится в некоем среднем положении, заданном с завода. Вот такому человеку электронное регулирование может помочь использовать мотоцикл более полноценно, потому что нажать пару кнопок может любой, а часто вообще ничего не надо делать, достаточно просто переключить режим езды, и подвеска придет в наиболее подходящее для этого режима положение.
Но, как вы сами понимаете, никакого особенного волшебства в электронно-регулируемой подвеске нет. Для того, чтобы добавить это самое волшебство в подвеску, надо делать что-то гораздо более сложное.
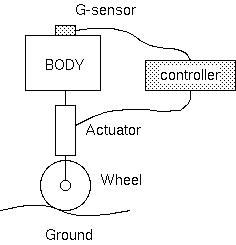
В идеале, конечно, нужно вообще избавиться от стандартной схемы задемпфированного упругого элемента, и сделать так, чтобы подвеска перестала быть колебательной системой. Вместо этого положение неподрессоренной массы нужно контролировать непосредственно, заставив его полностью следовать всем неровностям дороги, и сохраняя более или менее неподвижное положение подрессоренных масс. По сути дела нужно сделать обычный стабилизатор, примерно такой же, какой стабилизирует, например, положение танковой пушки. Или объектива видеокамеры. То есть сделать активную подвеску.
Этого можно достичь, поставив между неподрессоренной и подрессоренной массой какой-то достаточно быстродействующий и мощный линейный двигатель (актуатор). Если дополнить его акселерометром на подрессоренной массе, и включить этот акселерометр в контур отрицательной обратной связи, который будет управлять усилием на этом актуаторе, можно (в теории), добиться очень хорошей работы подвески в любых дорожных условиях и в любых ситуациях. Система управления будет управлять усилием, просто пытаясь обнулить вертикальные ускорения подрессоренной массы, а минимальные ускорения неподрессоренной массы — это и есть главная задача подвески, как таковой.
Такой актуатор может быть гидравлическим, то есть по сути обычным гидроцилиндром. Естественно, что при этом понадобится достаточно мощная гидравлическая помпа, и достаточно быстродействующая система клапанов. Такая система может быть даже не электронной, а сугубо механической, и такие системы известны еще с 50-х годов. Конечно же, одного актуатора недостаточно (его возможности по отработке мелких неровностей ограничены быстродействием как самого актуатора, так и задержками контура управления), поэтому дополнительно ставится еще и упругий элемент, например пружина или воздушная подушка. Интересно тут то, что этот упругий элемент может ставиться не непосредственно, а в качестве гидроаккумулятора.
Можно также поставить электрический актуатор, как например, в маглевах.
Актуатор активной подвески может (теоретически) устанавливаться вместо всех остальных элементов, таких как упругий элемент и демпфер. Но на практике обычно работает либо последовательно, либо параллельно с «обычными» элементами, и служит для того, чтобы добавлять нужный импульс в нужный момент. Существует огромное количество различных схем, позволяющих применять внешнюю энергию к подвеске, но все они достаточно громоздки и сложны, так что актуальны в основном для автомобилей.


Активная подвеска имеет массу преимуществ, и может работать просто идеально, лучше, чем любой другой тип подвески. Помимо этого она может выполнять и дополнительные функции, например поднимать и опускать корпус ТС, выравнивать его, наклонять для удобства посадки и высадки, и много чего еще.
Минусов тоже много. Во первых, такая подвеска весьма большая и тяжелая, поскольку кроме самого актуатора требуется также достаточно мощный источник энергии для его работы. Сама эта энергия тоже должна откуда-то браться. Эта подвеска также весьма сложна, и конечно же, из-за своей сложности не очень надежна.
Для мотоциклов активная подвеска слишком тяжела, и требует слишком много энергии, поэтому не применяется. Однако, для мотоциклистов не все потеряно, потому что помимо настоящей активной подвески существует также полуактивная, или адаптивная схема.
Механическая схема полуактивной подвески практически не отличается от обычной, и точно так же содержит упругий элемент, и демпфер, который может демпфировать сжатие и отбой. И так же как в электронно-регулируемой схеме, регулировка предварительного поджатия и демпфирования выполняется при помощи электроприводов. Механически полуактивная подвеска вообще почти не отличается от электронно-регулируемой, и как правило, полуактивные подвески и делаются на основе обычных подвесок с электронным регулированием.
Базовый принцип работы полуактивной подвески в общем-то ясен из ее второго названия, мы же помним, что она является адаптивной. Если снабдить подвеску датчиками ускорений на подрессоренной и неподрессоренной массе, а также датчиком положения штока демпфера, то в любой момент времени можно получить достаточно полную информацию о происходящем как с подвеской, так с и транспортным средством вообще. Если постоянно анализировать эту информацию, то можно динамически подбирать настройки подвески, исходя из текущих условий движения. Это и есть, собственно, адаптация.
Конечно же, для того чтобы адаптация работала хорошо, и была достаточно полезной, быстродействие регуляторов подвески должно быть достаточно большим. Обычно этого не требуется для предварительно поджатия (да его и все равно нельзя сделать быстро, не применяя излишне мощных приводов), но регулировка демпфирования должна быть весьма быстрой.
Такая регулировка может быть сделана двумя способами. Первый — это динамически управляемая система клапанов, работающая примерно так же, как и при обычной регулировке, только побыстрее.
Есть и второй способ — можно динамически менять вязкость самой жидкости в демпфере, пользуясь тем, что существуют магнитореологические жидкости, меняющие свою вязкость в зависимости от напряженности магнитного поля. Звучит сложно, но по факту это просто взвесь мелких (очень мелких) намагничивающихся шариков в масле. Если залить такую жидкость в обычный амортизатор, и надеть на него катушку электромагнита, то можно получить амортизатор, который будет менять свои характеристики в очень широком диапазоне, просто следуя за силой тока в этой катушке.
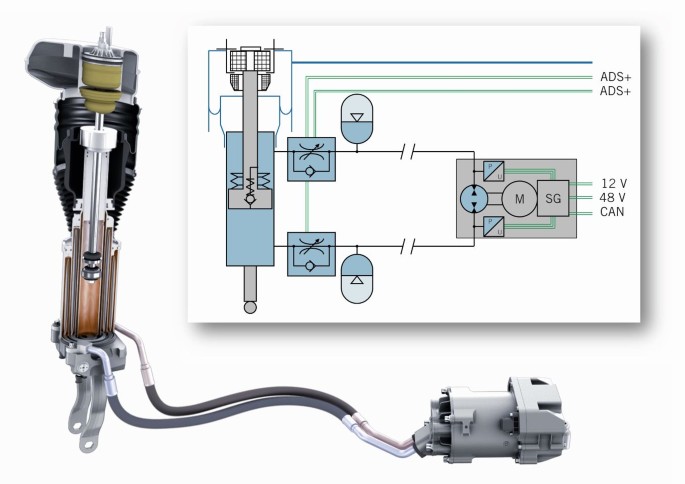
На мотоциклах применяется гидравлическая схема динамического регулирования, основой которой служит достаточно обычный конический клапан, управляемый соленоидом. В зависимости от положения, он меняет свою пропускную способность, и тем самым может регулировать демпфирование. Поджатие пружины регулируется как обычно, при помощи сервопривода, то есть обычного моторчика с редуктором. Может быть кто-то и будет применять магнитный способ регулирования демпфирования, но пока что мне о таких решения не известно. Хотя магнитная схема имеет свои преимущества, и в общем-то более надежна. Возможно, она будет применяться на задних амортизаторах.
В отличие от электронно-регулируемой подвески, полуактивная подвеска также снабжена набором датчиков. Это акселерометры на неподрессоренных массах, в случае мотоцикла на пере вилки и на маятнике задней подвески. Также устанавливаются акселерометры подрессоренной массы, их как правило два, один установлен в передней части рамы, над передней подвеской, второй обычно располагается около центра масс мотоцикла, и часто это просто часть IMU, то есть часть инерциальной платформы, которая нужна, например, для углового АБС, управляемого вилли и стоппи, и тому подобных вещей. Амортизаторы подвески также снабжаются датчиками положения штока, чтобы управляющая электроника могла понимать текущее состояние подвески, реагировать соответственно.
Также, естественно, у подвески имеется собственный ECU, к которому подключены все эти датчики, а также клапаны регулирования и приводы предварительного поджатия. Этот ECU связан с другими электроными системами мотоцикла, или даже может быть частью общих мотоциклетных «мозгов» (чаще нет, потому что подвеску делают отдельные компании).
Кроме того, к ECU подвески подключается датчик давления передней тормозной магистрали, я потом расскажу, зачем это нужно.
В процессе езды электроника постоянно анализирует данные, поступающие с акселерометров, и подстраивает подвеску (фактически, демпфирование сжатия и отбоя), исходя из результатов этого анализа. По характеру колебаний подвески можно с определенной долей уверенности судить от том, по какой именно дороге в данный момент едет мотоцикл, и настроить демпфирование соответствующим образом. О результатах этой подстройки можно судить по колебаниям подрессоренных масс, их, конечно же, нужно сводить к минимуму. Подвеска при этом работает как обычно, но естественно, ее характеристики постоянно, и достаточно быстро меняются. Этот процесс также зависит от текущего режима езды, установленного мотоциклистом. В спортивном подвеска будет настраиваться в одном диапазоне, в дорожном в другом, в эндуро в третьем, и т.д. Кроме того, режим езды также может влиять на настройку предварительного поджатия, она конечно же не меняется на постоянной основе (этот процесс слишком медленный), но может быть выставлена при смене режима.
Сама по себе адаптация подвески под текущие условия весьма полезная вещь, и она избавляет мотоциклиста от необходимости настраивать подвеску, щелкая кнопочками, тем более что электроника, располагающая более полными данными, и запрограммированная специалистами, может справиться с этой работой даже лучше, чем средний мотоциклист. Но согласитесь, это тоже звучит как-то скучновато, и никакого особенного волшебства тут тоже нет, ну адаптируется подвеска, и что? Хочется же, чтобы она работала так же волшебно, как работает настоящая активная, то есть чтобы она не просто адаптировалась под текущие условия, но и была активным стабилизатором. И к счастью, это в определенной степени возможно даже при полуактивной схеме подвески. Давайте разберемся, что тут можно сделать.
Самое главное техническое отличие полуактивной подвески от обычной электронно регулируемой — как раз в клапане, регулирующем демпфирование. Вместо того, чтобы медленно крутить шаговичком нечто вроде жиклера, в полуактивной подвеске соленоид перемещает конусный клапан, и он может перемещать его довольно быстро. Быстро — это значит примерно 10 мс на перемещение от одного крайнего положения в другое. Вообще говоря, это быстрее, чем обычно перемещается сам шток демпфера, то есть такой клапан уже можно использовать не только для подстройки, но и для динамического управления уже в процессе каждого отдельного хода подвески. Это конечно не настоящий актуатор активной подвески, но при должном подходе может получиться что-то очень похожее — регулируя сечение клапана на каждом ходе подвески, можно достичь практически полного управления усилием.
Второе отличие тоже очень важно. Оно в том, что диапазон регулировани демпфирования в полуактивной подвеске может быть гораздо больше, чем в обычной. Например, раз в 10. Вот, например, как это выглядит в подеске Ducati Multistrada:

Конечно же, обычной подвеске, даже если она регулируется электроникой, такие диапазоны не нужны, мало того, они и вредны. В большей части этих диапазонов подвеска вообще по сути дела перестает работать, становясь либо простой пружиной без демпфирования, либо наоборот — ломом, практически без амортизации. Но если у нас реализовано динамическое управление (а не просто адаптация), то эти большие диапазоны становятся очень интересными, потому что именно они как раз и позволяют извлечь из обычной схемы такой результат, который скорее свойственен активной схеме подвески. Как раз потому, что появляется возможность на короткий период времени загнать характеристики демпфирования туда, куда в обычной подвеске они не попадут никогда.
Так что же такое это динамическое управление полуактивной подвеской, и почему оно так важно?
Для начала рассмотрим специфические ситуации.
При экстренном торможении мотоцикла очень важно как можно быстрее нагрузить переднюю подвеску, то есть перенести вес мотоцикла на переднее колесо, потому что только после этого передний тормоз может по настоящему включиться в работу. Как мы помним, ECU подвески получает данные с датчика давления передней тормозной магистрали, и это дает возможность определить момент начала торможения, и немедленно «зажать» переднюю подвеску при помощи клапана, регулирующего демпфирование сжатия. Так как это происходит очень быстро, подвеска быстро загружается, и можно спокойно тормозить. Причем, что важно, степень этого «зажатия» может быть очень большой, мы же помним, что регулировка демпфирования имеет очень большой диапазон, и может превратить подвеску буквально в лом (этого невозможно достичь обычной регулировкой). Конечно же, подвеска становится столь жесткой только на очень короткий период времени, но этого вполне достаточно для правильного начала торможения. Это, собственно, и есть антиклевковая функция электронной подвески, она особенно важна на мотоциклах с АБС, потому что АБС и передняя подвеска при резком торможении могут создать резонансную пару. Таки образом, мотоцикл с современной полуактивной подвеской не только не «клюет» при торможении, но и позволяет тормозить более эффективно, и применять более простые техники торможения.
Аналогично подвеска может предотвратить проседание задней подвески при резком разгоне. Момент разгона определяется при помощи IMU, и задняя подвеска точно так же временно «зажимается».
Естественно, что для правильной реакции данных с датчика давления или акселерометра недостаточно, чтобы реагировать правильно и безопасно, используются также данные положения штока демпфера, то есть положения самой подвески.
Но это все частные случаи, хотя и безусловно очень полезные. Динамическое управление работает не только в этих случаях, вообще говоря оно работает всегда, и очень сильно улучшает качество и возможности подвески мотоцикла. Давайте рассмотрим эту работу более подробно.
Как я уже писал, клапаны, регулирующие демпфирование подвески, имеют весьма высокое быстродействие, порядка 10 мс на полную перекладку клапана. То есть, клапан может работать с частотой примерно 50 Гц. Это весьма большая частота, которая позволяет управлять демпфированием подвески непосредственно в процессе каждого ее хода, если конечно эти колебания подвески имеют частоту, скажем, не более 25 Гц. То есть, мелкие частые неровности подвеска отрабатывает как обычно, но при возникновении более крупных препятствий подвеска, фактически, превращается в активную, то есть может отрабатывать эти препятствия, как активный стабилизатор.
Работает это примерно так же, как и на настоящей активной подвеске, только исполнительным органом становится не актуатор, задающий усилие на подвеске, а гидравлический клапан, задающий степень демпфирования.
Так же как в активной подвеске, существует контур обратной связи, в который включаются данные акселераторов, и демпфирование изменяется постоянно, непосредственно реагируя на колебания подвески. И вот тут начинаются интересные подробности. Вообще говоря существует несколько основных алгоритмов работы активной или полуактивной подвески, которые очень сильно влияют на ее поведение, и на то, что ощущает мотоциклист. Главных из них два:

Я не буду вдаваться в математические подробности, но у этих алгоритмов есть принципиальные различия. Skyhook в первую очередь предназначен для того, чтобы минимизировать колебания подрессоренных масс, фактически контур обратной связи пытается обнулить эти колебания, насколько это возможно. Groundhook, напротив, ориентирован в первую очередь на то, чтобы колесо максимально точно следовало дороге. Именно поэтому они так и называются, первый как бы подвешивает мотоцикл в воздухе, второй «приклеивает» колеса к дороге. Конечно же, они не используются в чистом виде, реальные алгоритмы скорее что-то среднее, тем не менее, есть два четких направления, по которым идут создатели электронных подвесок для мотоциклов, и они достаточно сильно различаются на практике.
Самым известным вариантом полуактивной подвески является, конечно же, DSS, то есть Ducati Skyhook System, который Ducati делает вместе с компанией Sachsс 2013 года. Именно применение алгоритма Skyhook в управлении подвеской и делает Multistrada столь комфортной, при этом без малейшей потери управляемости и спортивности на асфальте. Однако, при езде по грунту DSS показывает себя не с самой лучшей стороны, фактически на грунте активность подвески никак себя не проявляет.
В подвеске WP, которая устанавливается на KTM SAS, Triumph Tiger, и некоторые другие мотоциклы, подход прямо противоположный — основой является алгоритм Groundhook. Этот алгоритм держит колеса на дороге, и обеспечивает заметно лучшую управляемость в сложных условиях, особенно на грунтовках, но гораздо менее комфортен.
Надо понимать, что ни один из этих подходов не лучше и не хуже другого, а технически эти подвески устроены вообще практически идентично, разница только в алгоритмах активного регулирования. Просто компании ставили перед собой несколько разные цели, и соответственно, получили различающийся результат.
Есть также случаи, когда полуактивная подвеска практически является именно адаптивной, не извлекая каких-то заметных преимуществ от динамического управления. Как ни странно, это BMW Dynamic ESA, где слово «динамический» вынесено аж в название. Причем в случае обычной кинематики подвески, например на S100XR, работа D-ESA чувствуется хотя бы в антиклевковой функции, а вот в случае Telelever гуся D-ESA фактически работает как обычная адаптивная подвеска, работа динамических алгоритмов почти не заметна. Впрочем, это может быть связано с самой кинематикой телелевера.
Конечно же, работа динамических алгоритмов сильно связана с выбранным режимом езды. Однако, влияют не только режимы. Наиболее современные системы также связаны с IMU, и могут также изменять свое поведение в поворотах, в том числе выступая в качестве активного стабилизатора. В сочетании с антиклевковой функцией, это достаточно сильно улучшает активную безопасность мотоцикла.
На данный момент системы электронных подвесок на мотоциклах уже достаточно развиты, хотя все еще относятся к первому поколению. Они вполне способны очень сильно изменить поведение мотоцикла, ощущения от езды, и сделать мотоцикл заметно более безопасным, особенно в сочетании с другими электронными системами. Наилучших результатов обычно достигают совместные действия производителя подвески и производителя мотоцикла — подвеска достаточно тщательно настраивается на конкретный мотоцикл, и интегрируется с другими его системами. Однако, вполне доступны комплекты полуактивных подвесок, которые можно установить на модели, на которых полуактивная подвеска никогда не предусматривалась. Например, елка делает комплект апгрейда для Multistrada 1200 2010 модельного года.
Вообще говоря, если вы видите, что мотоцикл оснащен электронной подвеской, это далеко не всегда означает одно и то же. Есть подвески, полностью реализующие возможности электронного управления, то есть имеющие в своем составе алгоритмы обратной связи, и являющиеся действительно полуактивными. Это, например подвески Ducati, KTM и Triumph. Причем, в них используются разные алгоритмы, и не стоит ждать от подвески WP на KTM лучшего комфорта, применяемый там алгоритм улучшает сцепление колес с дорогой, но на неровностях вас все так же будет потряхивать. Есть подвески, которые ограничиваются только адаптивными алгоритмами, таких, собственно, большинство, и самая известная из них — D-ESA. Обычно они построены на основе электронно-регулируемых подвесок, то есть не имеют быстродействующих клапанов, и применять алгоритмы обратной связи на них просто невозможно. Например, подвески Ёлинз относятся именно к этой категории. Но и у таких адаптивных подвесок тоже есть различия. Такие как D-ESA, используют набор акселерометров на колесах, для того, чтобы определять свойства дорожного покрытия, и подстраиваться под него. Другие, например Ohlins Mechatronics, вообще не имеют датчиков, и полагаются на «мозги» мотоцикла, которые могут выбирать режим подвески, например исходя из манеры езды мотоциклиста.
Позвольте теперь закончить тем, с чего, собственно и начал, то есть с краткой классификации электронных подвесок, на фоне вышесказанного она будет более понятна.
Это конечно очень условное деление, встречаются и такие конструкции, которые сложно отнести к какой-то конкретной группе из перечисленных. Например, некоторые варианты Touratech имеют быстродействующие клапаны, но не используют алгоритмы обратной связи, и не имеют связи с акселерометрами. Такая подвеска технически устроена как полуактивная, а работает примерно как электронно-регулируемая. Однако она имеет датчики перемещения штоков, и может быстро реагировать на резкие перемещения, довольно сильно расширяя диапазон работы.
И надо понимать, что электронное регулирование — это особенность самой подвески, а вот адаптивность, и тем более активная стабилизация — это уже свойства системы подвеска-мотоцикл. Одна и та же подвеска типа Oilins Mechatronics может быть как дистанционно-регулируемой при установке в качестве афтермаркета, так и адаптивной, если ставится как сток и интегрируется с ECU мотоцикла (как, например, на Multistrada 2010).
По всей видимости, по мере развития этой темы, полуактивные подвески постепенно будут вытеснять обычные (что уже произошло на топовых моделях). Причина примерно та же, что и с карбюраторами — для того, чтобы достигать хороших характеристик, обычные подвески нужно делать очень сложными механически, уже существуют варианты, в которых несколько разных гидросхем работают совместно, переключаясь в зависимости, например, от скорости перемещения штока. Понятное дело, что есть вполне естественные пределы такого рода усложнений, тем более что и настраивать такую систему тоже очень сложно (можно вспомнить те же карбюраторы последних серий). В полуактивной подвеске таких же и даже лучших результатов можно достичь, просто модифицируя алгоритмы работы. В конечном итоге полуактивная подвеска будет просто дешевле и легче, чем такая же традиционная.